
16/07/2020 – Tests en mer de la version #3 des dispositifs
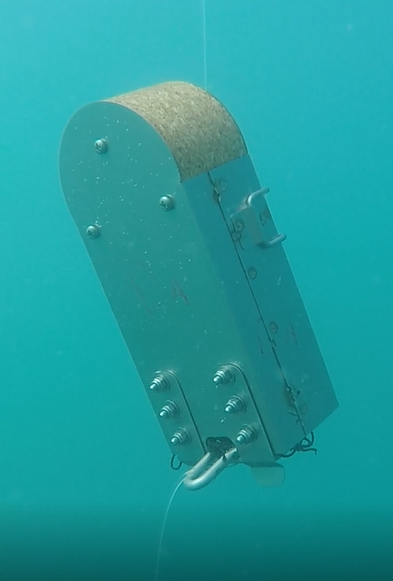
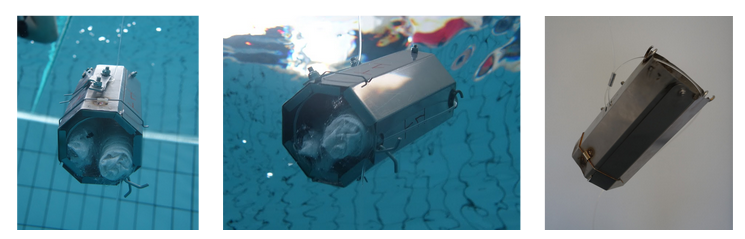
Malgré un ralentissement lié à la crise sanitaire du coronavirus, les activités menées dans le cadre du projet PARADEP ont suivi leur cours. La dernière version (#V3) des dispositifs a été conçue durant cette période. Cette version a vu l’amélioration de l’étui et des voiles protectrices, conçues dans des filets en polyéthylène haute densité.




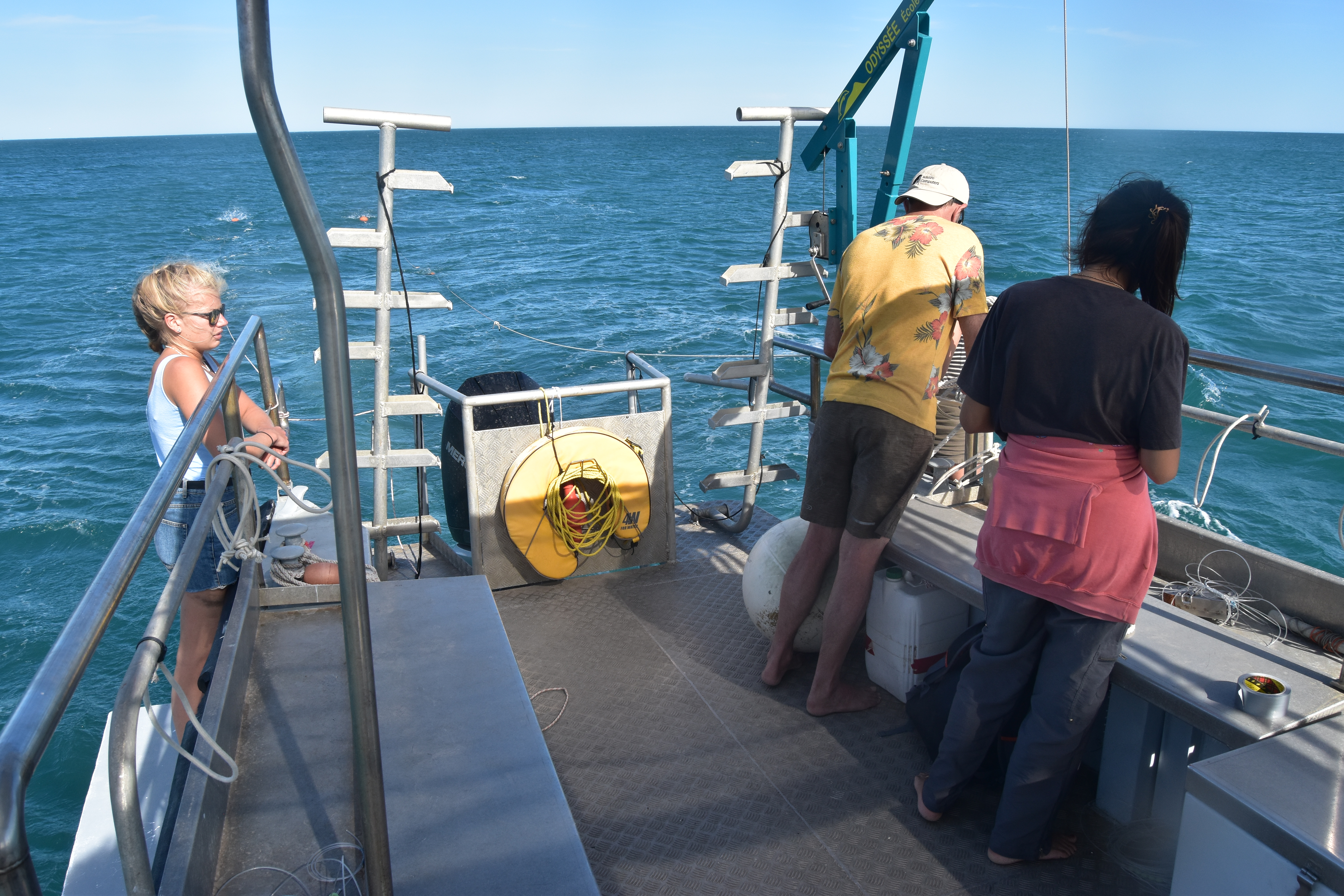
Les tests préliminaires de cette version ont eu lieu en mer le 16 juillet 2020 au large du brise-lames de Sète. Les expérimentations se sont déroulées à bord du bateau de plongée du club associatif Odyssée (http://odyssee-sub.org/). Le chantier de plongée a été encadré par Emmanuel Serval, président du club.
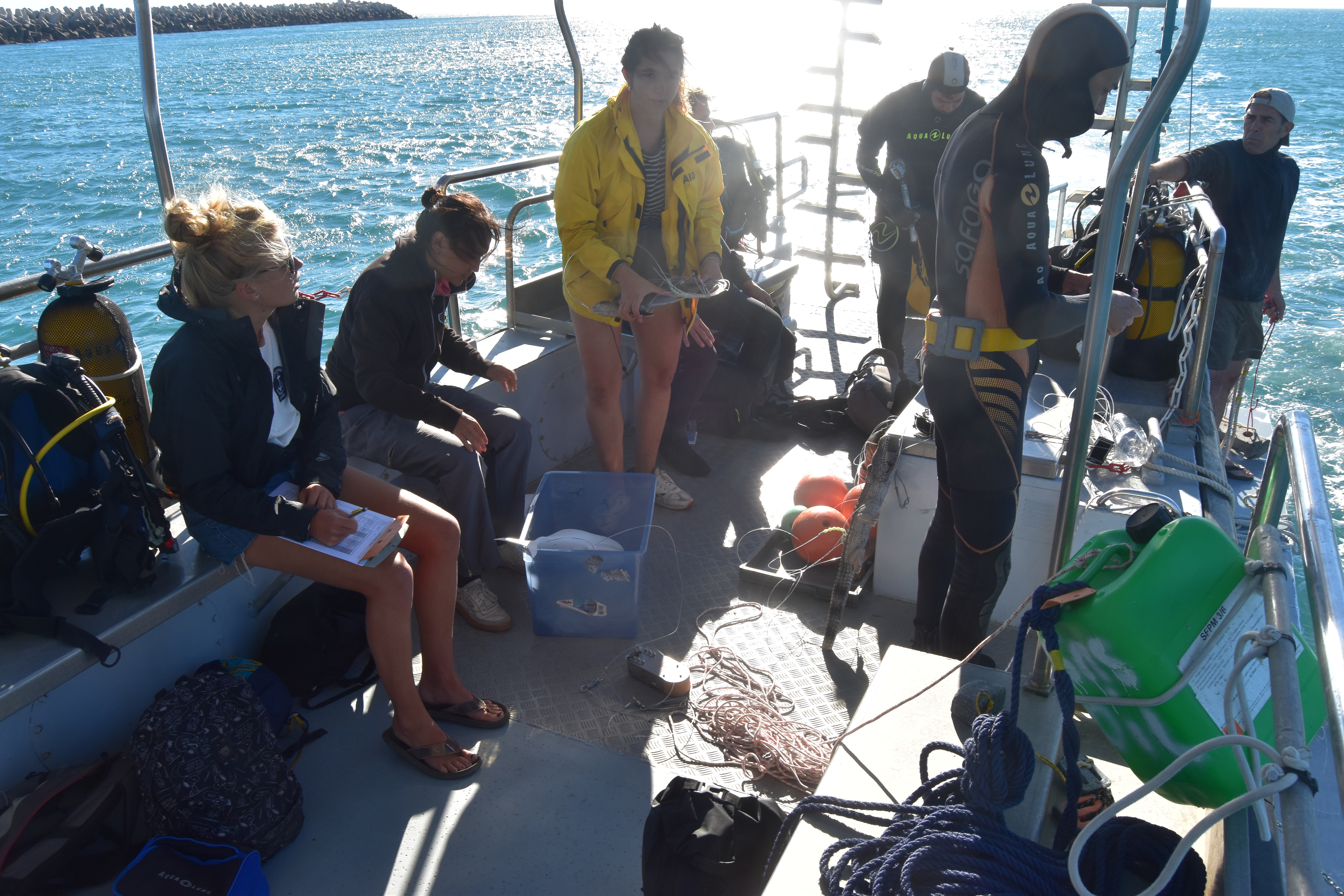
L’équipe de plongeurs était composée de 3 personnes (Philippe Sabarros, Romain Bach, Alexandre Mignucci). A bord, 5 personnes ont eu pour tâche de mettre à l’eau la palangre expérimentale, de disposer les avançons équipés des dispositifs sur la ligne-mère, de collecter les données, de prendre des images, de remonter la palangre à bord et de ranger les dispositifs (Pascal Bach, Chloé Yven, Auriane Serval, Yoluène Massey et Njaratiana Rabearisoa).
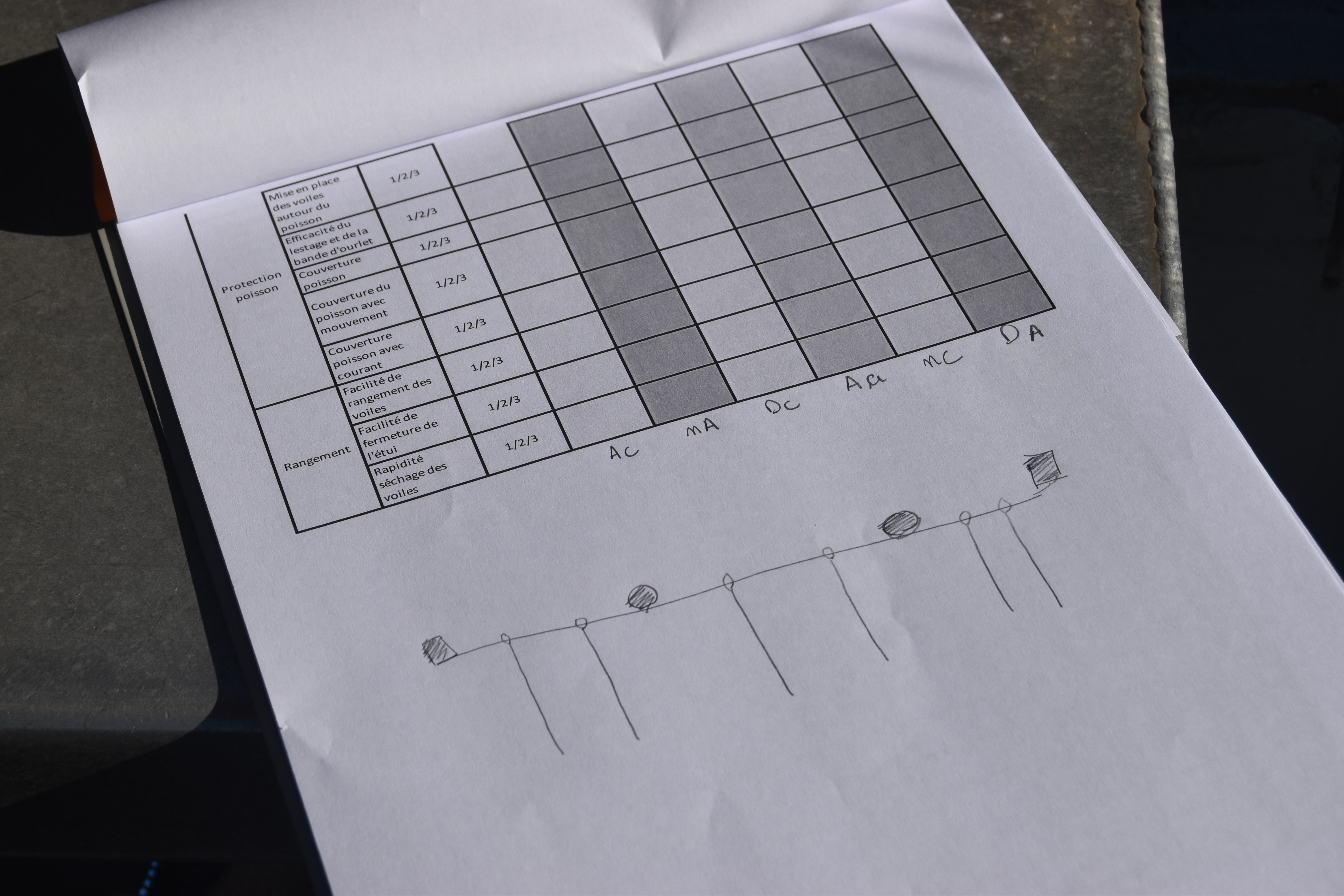
Au cours des tests, les plongeurs ont déclenché 6 dispositifs sous l’eau en simulant une capture de poisson à l’extrémité de l’avançon, et ont filmé leur comportement. Plusieurs critères ont été évalués pour chaque prototype au cours de ces expérimentations : déclenchement, manipulation, descente, couverture du poisson, rangement,… Les résultats issus de ces tests sont accessibles sur l’article suivant : https://paradep.com/retour-sur-les-tests-de-la-version-3-des-dispositifs/










L’équipe PARADEP tient à remercier toutes les personnes pré-citées, qui ont permis que les expérimentations se déroulent dans les meilleures conditions.

Chloé YVEN est étudiante en 3è année Génie de l’environnement marin à l’Institut National des Sciences et Techniques de la Mer (Intechmer) à Tourlaville. En raison de la crise sanitaire liée au coronavirus, elle a débuté son stage en télétravail début mai, et a rejoint l’équipe PARADEP en présentiel fin juin à Sète. Son sujet de stage porte sur la conception des filets de protection de la version 3 des dispositifs anti-déprédation et leurs tests sur le terrain au large de Sète. Si l’occasion se présente, elle embarquera également sur des palangriers de la région pour tester les dispositifs en conditions de pêche. Elle terminera son stage le 4 septembre 2020.


10/03/2020 : Une présentation du projet PARADEP a eu lieu au Lycée de la Mer (http://www.lyceedelamer.fr/) auprès d’une classe de BTS en Pêche et Gestion de l’Environnement Marin.

Lycée de la Mer Paul Bousquet – Sète
Au cours de cette intervention d’une heure et demie, Auriane et Njaratiana ont présenté les résultats sur l’ampleur de la déprédation dans l’Océan Indien, la perception de ce phénomène par les pêcheurs réunionnais et les solutions mises en oeuvre pour réduire les impacts de la déprédation, avec un accent mis sur les actions menées dans le cadre de PARADEP. Les différentes versions des prototypes de dispositifs anti-déprédation testées dans le cadre du projet ont également été présentées aux élèves.



Un extrait de la présentation d’Auriane est visible à ce lien.
Un grand merci à Alexandre Castillo et Clément Calmettes, enseignants au Lycée de la Mer, pour leur accueil chaleureux lors de cette intervention.

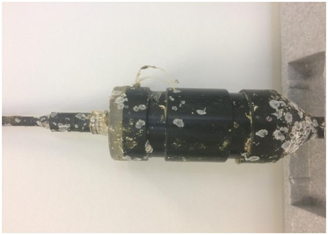
La version 2 des dispositifs anti-déprédation a été testée les 25 et 26 février 2020. Les nouveaux prototypes ont inclus une partie des modifications demandées à la fin des tests de la version 1 : les voiles en lin ont été remplacées par une combinaison de filets maillants en monofilament et de tissu en ramie, le support mobile a été remplacé par un tore métallique qui sert également de système de déclenchement, le système de fixation de l’étui à l’avançon a été remplacé par une pince ressort à l’arrière de l’étui, le système de lestage des voiles a été revu et le système d’ouverture de l’étui a été modifié.
Version 2 du prototype anti-déprédation 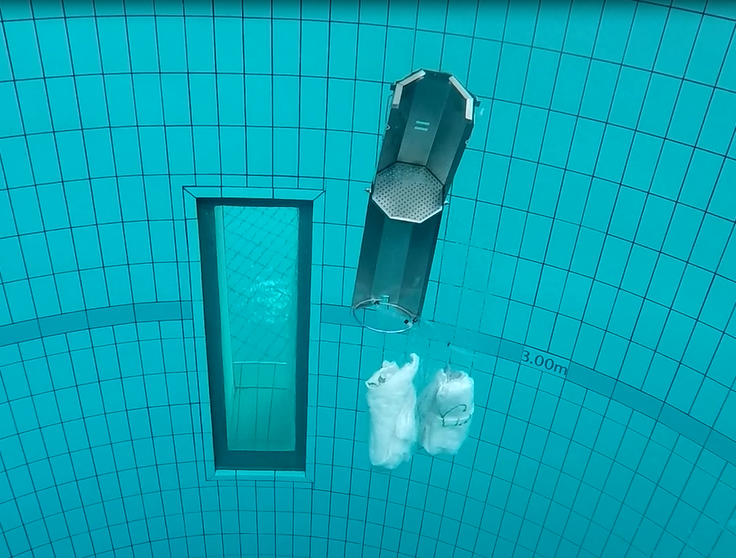
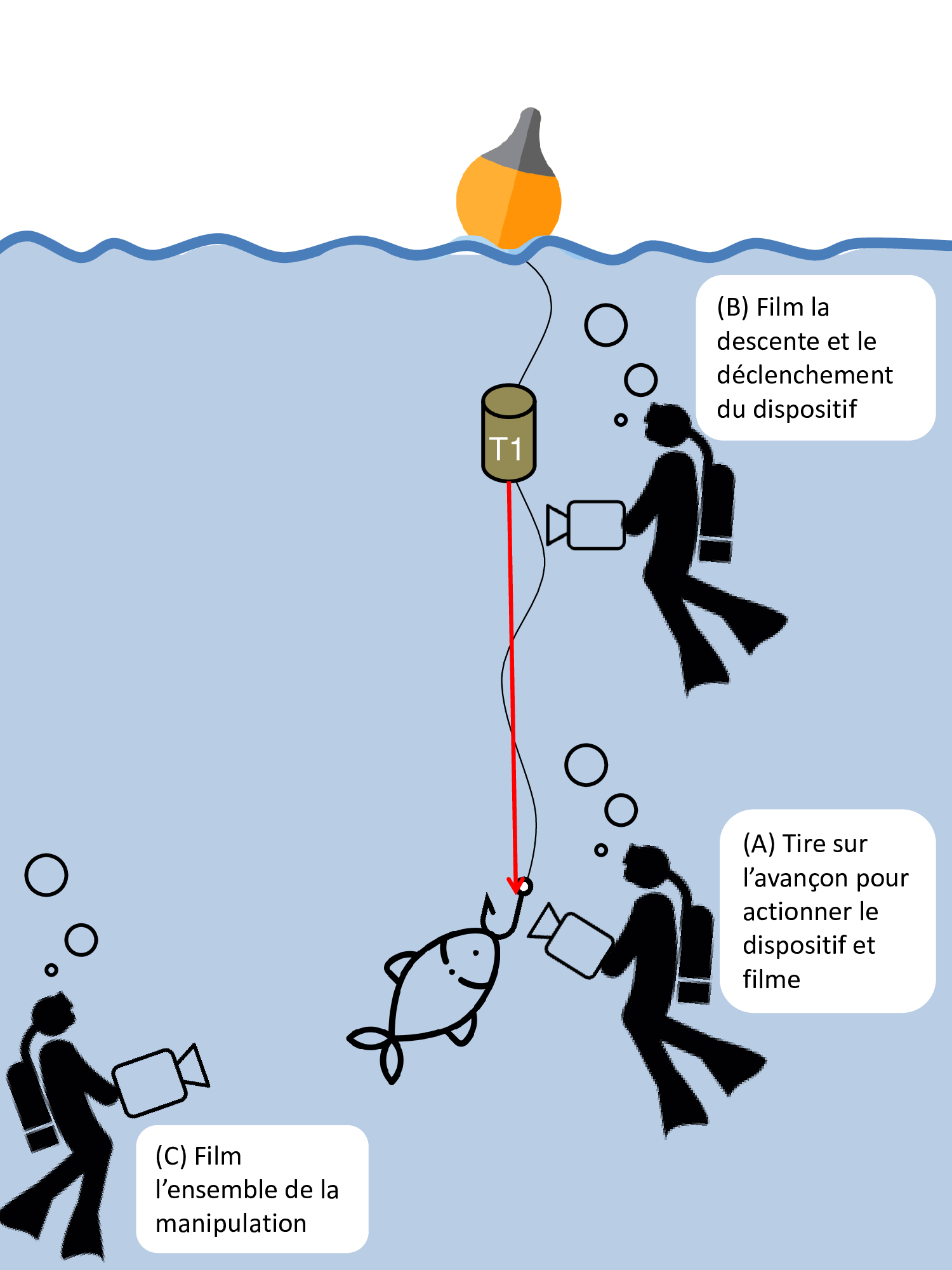
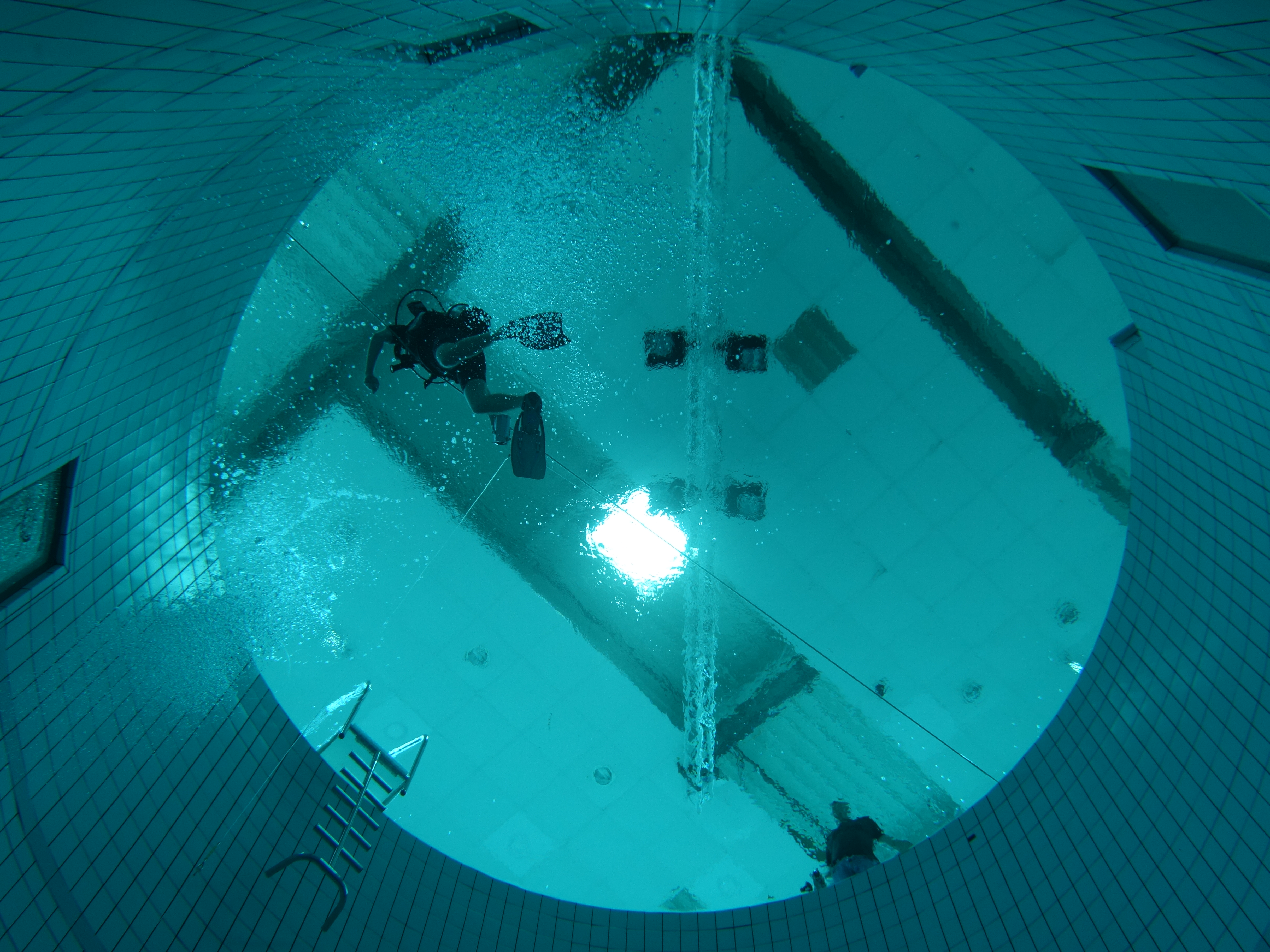
La première partie des tests s’est déroulée dans la fosse nautique Nemausa à Nîmes (https://www.vert-marine.com/nemausa-nimes-30/). Au cours de cette journée, 3 plongeurs équipés de caméras ont filmé le déploiement des dispositifs et leur descente le long de l’avançon. La seconde partie des tests s’est déroulée à bord d’une embarcation sur la lagune de Thau. Au cours de cette journée, un palangre expérimentale équipée des dispositifs a été mise à l’eau. L’objectif de ces deux journées de tests a été d’évaluer le comportement du dispositif lors de l’accrochage sur la ligne et du filage, d’analyser son déploiement (déclenchement, fluidité de la descente le long de l’avançon), la protection des voiles au moyen de moulages de poisson (déploiement et mise en place des voiles), son comportement lors du virage, l’impact de la vitesse du bateau sur le déclenchement intempestif, et le rangement du dispositif.
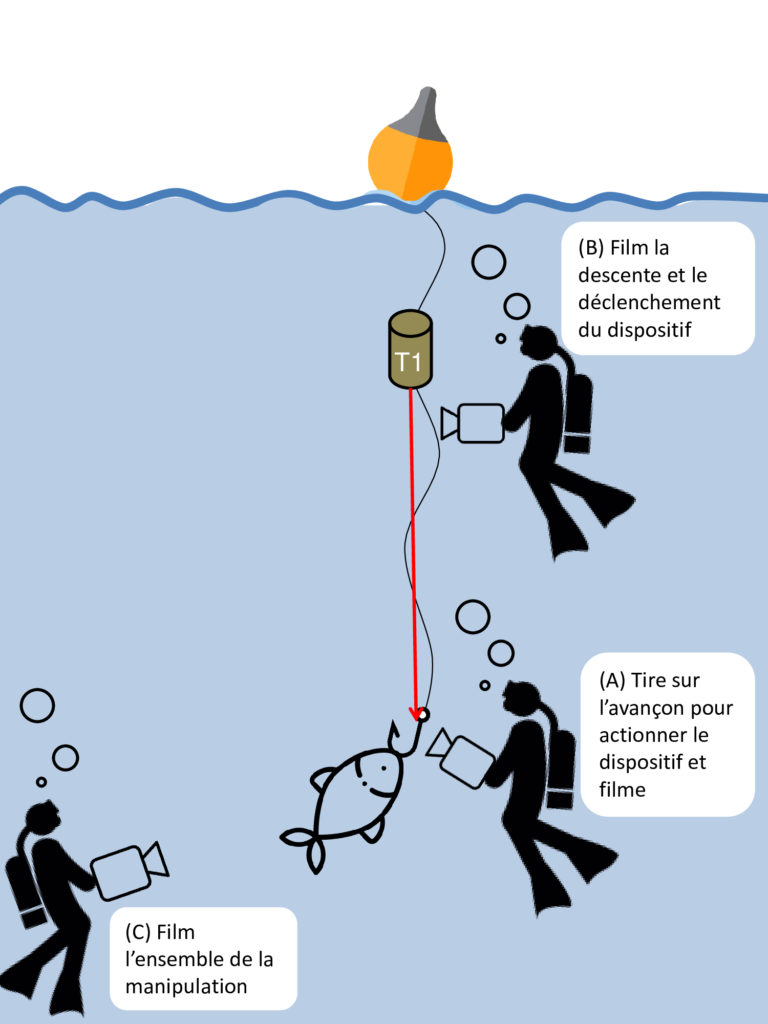
Configuration des expérimentations en fosse (Schéma : A. Serval) 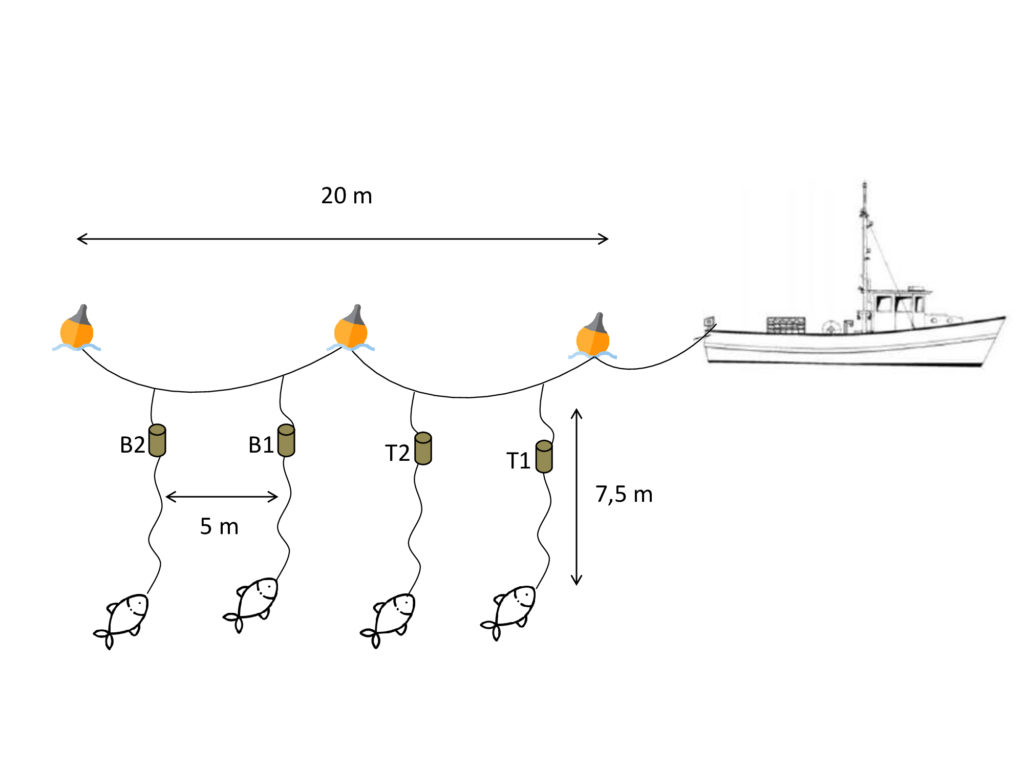
Configuration des expérimentations sur la lagune (Schéma : A. Serval)



Ces essais ont révélé d’autres points à corriger avant d’arriver à une version pleinement opérationnelle. Nous sommes actuellement en train de conceptualiser d’autres modifications à apporter au prototype et qui nous conduira à la version 3, qui sera testée prochainement. Nous nous concentrons en particulier sur les matériaux à utiliser pour la conception des voiles de protection, ainsi que la miniaturisation de l’étui et l’amélioration du système de déclenchement.
Les pilotes du projet PARADEP souhaitent remercier Auriane SERVAL, stagiaire de l’Université de Montpellier, qui s’est pleinement investie dans la mise en œuvre de ces tests, ainsi que les différents acteurs qui ont participé à ces essais. Pour les manipulations en piscine, nous remercions les 3 plongeurs : Emilie Boulanger, Romain Bach et Jules Héliou. Marc Soria pour son aide au cours des manipulations sur le bord du bassin. Luc Markiw, caméraman au service Images IRD d’avoir prêté son matériel vidéo pour filmer les manipulations. Ilan Perez pour nous avoir aidé au cours des manipulations sur le bateau. Romain Gros, de l’Université de Montpellier, qui a aidé à la logistique des expérimentations sur la lagune de Thau. Merci également au personnel du centre nautique Nemausa pour leur accueil, en particulier à Guillaume Barbotin et Annabelle Bonin.

03/02/2020 : Début du stage de Auriane SERVAL (L3 Ecologie Bologie des Organismes, Université de Montpellier).
Sujet : Suivi des tests d’un dispositif visant à réduire la déprédation par les mammifères marins en interaction avec les pêcheries palangrières pélagiques
Contenu du stage :
Partie 1 : Sète (Février-Mars)
- Bibliographie
- Mise en place d’un protocole scientifique
- Tests de la deuxième version des prototypes de dispositifs anti-déprédation en fosse de plongée
- Analyse du comportement des dispositifs
Partie 2 : La Réunion (Avril-Juillet)
- Mise en place d’un protocole scientifique
- Tests de la version finale des prototypes de dispositifs anti-déprédation au cours d’embarquements à bord de palangriers pélagiques
- Collecte et saisie des données
- Analyse du comportement des dispositifs
- Entretiens avec les pêcheurs sur leur perception de l’utilisation des dispositifs
Encadrement : N. Rabearisoa, P. Bach
Durée : 6 mois
Lieu : IRD MARBEC, Sète et NEXA (Le Port, La Réunion)


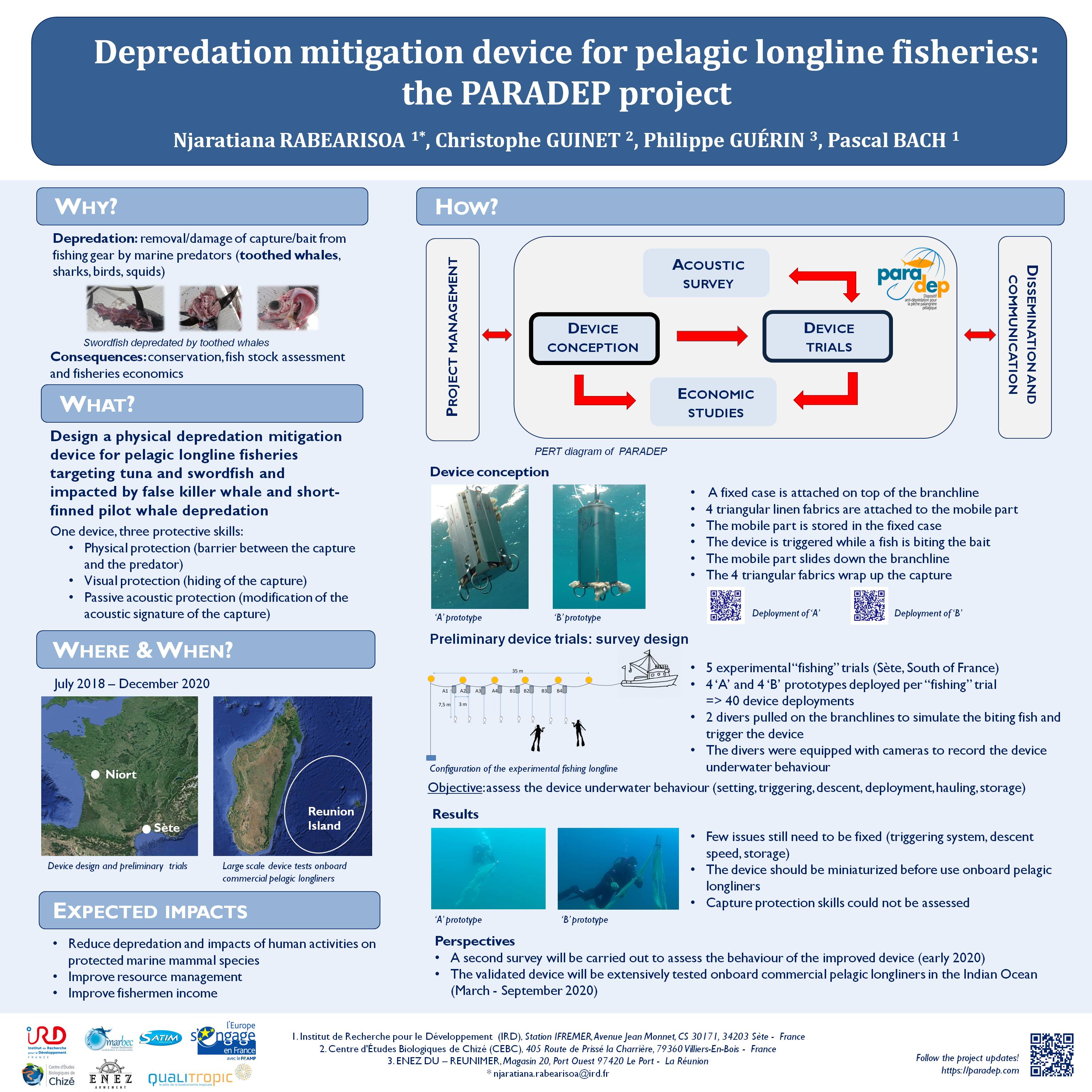
Le projet PARADEP a été présenté à la conférence biennale WMMC (World Marine Mammal Conference, https://www.wmmconference.org/) organisée par la Society for Marine Mammalogy (SMM) et l’European Cetacean Society (ECS) en Décembre 2019 à Barcelone. Cette conférence internationale vise à rassembler les chercheurs, étudiants et industriels travaillant sur des sujets très divers ayant trait aux mammifères marins (écologie, comportement, conservation, physiologie…). Au total, environ 600 présentations orales et 1000 posters ont été présentés durant ce symposium, qui a vu la participation de près de 2500 personnes.
Dans ce cadre, le projet PARADEP a été présenté sous forme de poster dans la catégorie « Interactions entre les mammifères marins et les pêcheries ». Le poster s’est particulièrement concentré sur les prototypes préliminaires et leurs tests en milieu naturel, à l’aide de projections de vidéos et des dispositifs physiques. Des contacts intéressants avec d’autres équipes travaillant sur des sujets similaires ont été pris durant cette conférence. Le poster est téléchargeable ci-dessous.

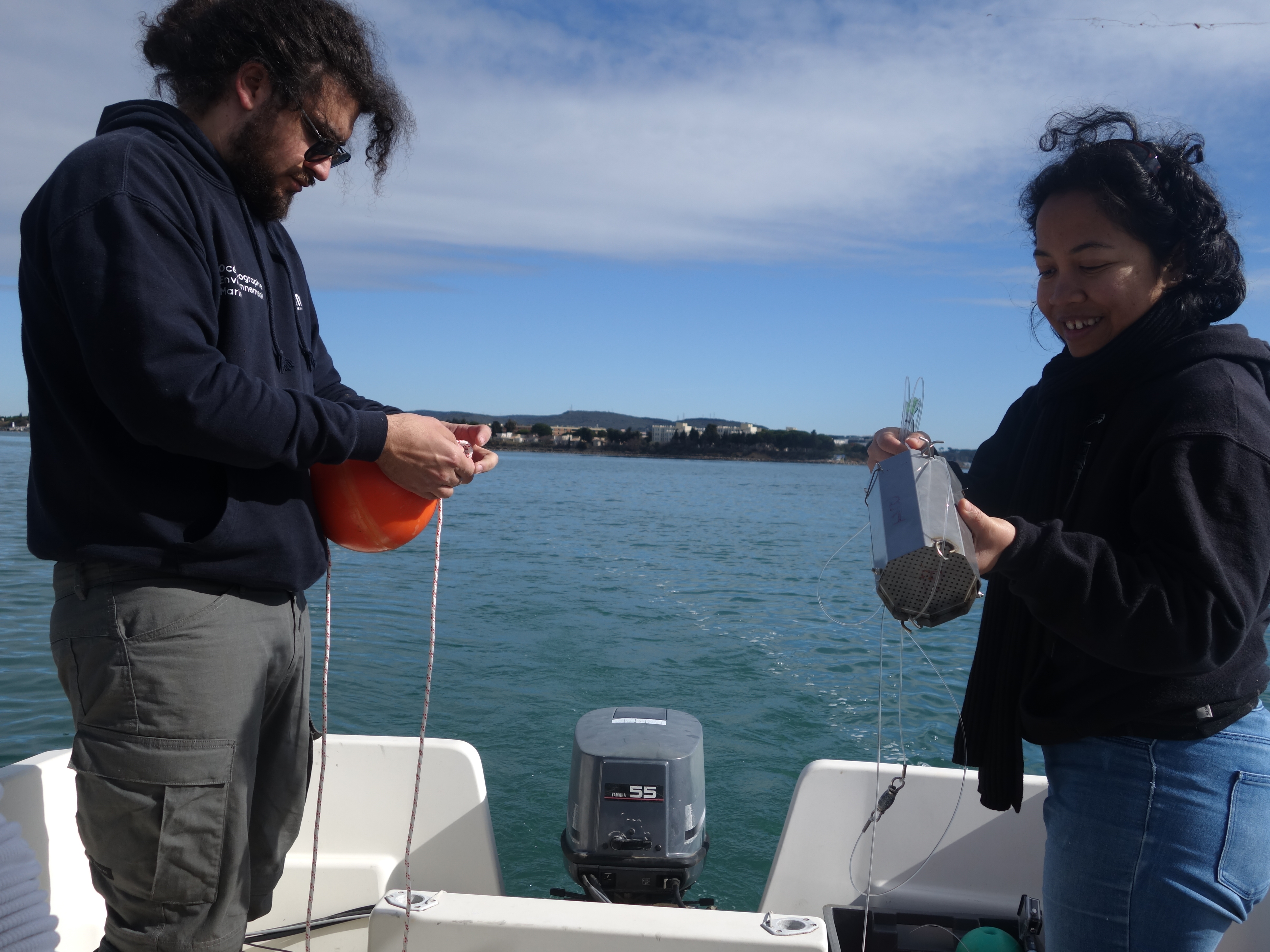
Les premiers tests de dispositifs anti-déprédation ont eu lieu en mer au large de Sète, sur le site du brise-lame, les 02 et 07 août 2019. Des agents IRD, IFREMER et SATIM ont participé à ces expérimentations qui se sont déroulées à bord d’une embarcation IFREMER. L’objectif de ces tests a été de tester deux prototypes de dispositifs (dénommés « A » et « B ») dans un plan d’eau de 20m d’eau. Huit avançons, équipés des prototypes ont été accrochés sur une palangre expérimentale de 35m. Des loups et des merlus ont été accrochés à chaque hameçon afin de simuler le poisson capturé. Quatre prototypes A et quatre prototypes B ont été testés. Une fois la ligne équipée des avançons et des dispositifs mis à l’eau, deux plongeurs se sont mis à l’eau et ont tiré séquentiellement sur les avançons pour simuler la traction exercée par la capture et déclencher chaque dispositif. Les plongeurs étaient équipés de caméras pour filmer le déclenchement de chaque dispositif jusqu’à sa descente sur le poisson. Cinq filages de la palangre expérimentale ont été effectués, correspondant à 40 déclenchements de dispositifs.

Equipage à bord du Chlamys 
Plongeur se dirigeant vers la palangre expérimentale 
Configuration de la palangre expérimentale équipée des 4 dispositifs A et des 4 dispositifs B

Dispositif A :
Le dispositif A se compose d’un support mobile métallique sur lequel 4 voiles en lin sont accrochées. L’étui, qui s’accroche à l’attache reliant l’avançon à la ligne-mère, se compose de compartiments destinés à loger les voiles. Le support mobile se verrouille sur l’étui au moyen de « pattes ». L’avançon passe à travers le dispositif, ainsi qu’à travers un carré métallique de déverrouillage qui appuie sur le support métallique lorsqu’un poisson exerce une traction sur le fil en nylon. Cette action déclenche la libération du support mobile et des voiles qui coulissent alors le long de l’avançon jusqu’au poisson.

Dispositif A
Dispositif B :
Le dispositif B se compose d’un étui cylindrique creux qui s’accroche à l’attache reliant l’avançon à la ligne-mère. Le support mobile, qui s’insère dans cet étui, se compose des loges destinés à ranger les voiles. Les 4 voiles en lin sont accrochées à la base du support mobile. L’avançon passe à travers le dispositif, ainsi qu’à travers un carré métallique de déverrouillage qui appuie sur le support métallique lorsqu’un poisson exerce une traction sur le fil en nylon. Cette action déclenche la libération du support mobile et des voiles qui coulissent alors le long de l’avançon jusqu’au poisson. A la différence du dispositif A, les voiles restent dans leur loge lors de la descente le long de l’avançon, et en sont extraites avec le courant et/ou avec le mouvement du poisson.

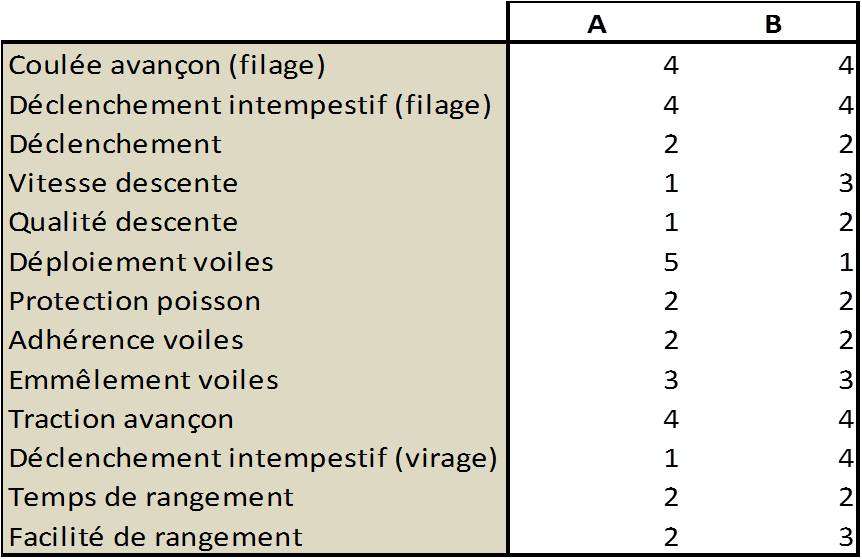
A l’issue des tests, les vidéos enregistrées ont permis d’analyser le comportement des dispositifs. Différents critères ont été évalués pour les deux dispositifs : le comportement au filage, le fonctionnement du système de déclenchement, la vitesse et la fluidité de la descente le long de l’avançon, le déploiement des voiles, la protection du poisson par les voiles, l’emmêlement des voiles entre elles ou avec l’avançon, le comportement au virage et le système de rangement.
L’évaluation de ces différents points a conduit aux critères de satisfaction ci-dessous :
Le rapport de ces premiers tests est disponible ci-dessous :
Les premiers résultats sont encourageants, mais des modifications doivent encore être apportées avant la validation des prototypes. Une deuxième série de tests sera donc programmée fin 2019-début 2020 pour réévaluer le comportement des dispositifs modifiés avant le développement en série en vue d’un déploiement sur les palangriers pour les tests en conditions de pêche.

Du 11 juin au 19 juin 2019, Marc SORIA, ingénieur acousticien du projet PARADEP, a embarqué à bord du Vétyver 6 (palangrier pélagique réunionnais de 16 m de long de l’armement ENEZ Pêche). L’objectif de cette mission était d’améliorer nos connaissances sur le comportement des odontocètes impliqués dans la déprédation autour du bateau. Pour mener cette mission, 24 accéléromètres (placés sur les bas de ligne), 6 hydrophones et 2 caméras (placés sur la ligne-mère) ont été déployés à chaque filage afin d’enregistrer des vidéos de ces animaux en interaction avec la ligne. Les enregistrements effectués par ces instruments devraient permettre d’analyser la présence et le comportement des globicéphales tropicaux et des faux-orques au cours des phases de déprédation des palangres pélagiques afin de mieux cerner les périodes de déprédation, le mode de détection des lignes et le mode de déprédation des proies.
Hydrophone ST300HF 200 mm L x 60 mm D 
caméra PARALENZ 116 mm L x 38 mm D avec son gréement (snap) 
accéléromètre DEEPG+
Déroulement de la mission
La mission s’est déroulée du 11 au 19 juin 2019, dans une zone de pêche située à environ 100 milles au sud de La Réunion. Six filages de palangre ont été effectués, avec un déploiement du matériel d’enregistrement acoustique et visuel. Les opérations de pêche se sont déroulées comme suit : filage de la ligne de 17h à 21h30, virage de la ligne de 5h à 13h (ou 15h selon le nombre de captures). 90km de ligne étaient mis à l’eau, avec un total de 840 hameçons appâtés avec du calmar.

Localisation de la zone de pêche
Le déploiement des appareils a suivi un plan d’échantillonnage systématique. Les deux caméras sont déployées au début du filage après la bouée de tête de ligne afin d’avoir le plus d’enregistrements de jour. Les 6 hydrophones sont déployés sur les orins des 6 premières bouées de section à environ 6 à 7 mètres de la ligne mère. Les 24 accéléromètres sont déployés de part et d’autres des hydrophones.

Filage de la ligne 
Immersion de la caméra 
Vue sous-marine enregistrée par la caméra
Résultats
Les espèces ciblées capturées ont été principalement le thon jaune, le germon, le thon obèse et l’espadon. Environ 600 kg de poissons ont été capturés par jour. Malheureusement, aucun globicéphale n’a été vu pendant la campagne et aucune trace de déprédation par des mammifères marins n’a été observée sur les prises.

Captures d’un thon et d’un espadon 
Thon déprédaté par un requin

Le traitement des données est en cours. Dans un premier temps nous échantillonnerons : les enregistrements des hydrophones pour tenter de déceler des « clicks » de globicéphales témoins de leur présence, et les enregistrements des accéléromètres pour déceler des secousses témoins de captures sur les bas de lignes aux dates et positions sur la ligne des prises notées. Bien qu’aucun globicéphale ou faux-orque ni de marques de déprédation de mammifères marins n’ait été observé, les données seront tout de même exploitées. En effet, il est possible que l’on ait enregistré des sons émis par des mammifères marins ayant évolué à proximité de la ligne (mais sans l’avoir déprédaté et/ou détecté). Il est aussi possible que nous ayons enregistré des sons émis par les thons et les espadons et nous tenterons de les isoler des enregistrements comme les images éventuelles que nous aurions pu enregistrer avec les caméras.
Le compte-rendu des tests est accessible ci-dessous :

02/08/2019 & 07/08/2019 : Premiers tests des prototypes de dispositifs anti-déprédation
Les premiers prototypes de dispositifs anti-déprédation vont être testés en mer, dans une zone de faible profondeur au large de Sète au cours de deux jours d’expérimentations. Ces expérimentations seront menées à bord d’embarcations de l’IFREMER. 8 exemplaires de 2 prototypes différents seront mis à l’eau sur une palangre expérimentale. Des plongeurs les déclencheront sous l’eau et enregistreront leur comportement à l’aide de caméras sous-marines. Des données sur les caractéristiques de déclenchement et de déploiement des dispositifs seront exhaustivement collectées.
Plus d’informations à venir dans le prochain article !

