Journée de la Mer
Le 3 Juin 2023, la Journée de la Mer a été organisée à la Darse Foucque au Port par le ClusterMer Réunion dans le cadre du Festival de l’Océan 2023. Au cours de cette journée, plusieurs organismes et entreprises ont tenu un stand et présenté leurs activités. L’IRD a tenu un stand pour y présenter les projets PARADEP, ESCOD, et ASUR. Les posters présentés au cours de cette journée sont téléchargeables ici : PARADEP, ESCOD.

Participation à la conférence ECS 2023
La BDRI (Bottlenose Dolphin Research Institute) a organisé la 34è Conférence annuelle de l’ECS à O Grove, Galice, en Espagne du 16 au 20 Avril 2023 (https://www.europeancetaceansociety.eu/conference/34th-annual-conference-galicia-spain). Le thème de la conférence était « Nos Océans, Notre Futur : Ecologie comportementale des mammifères marins et utilisation durable des ressources marines ». Cette conférence a rassemblé 500 scientifiques appartenant à différentes institutions et travaillant dans divers domaines relatifs à la conservation, l’écologie ou la biologie des mammifères marins dans les eaux européennes (incluant donc l’outre-mer français). Le programme a inclus 2 jours de workshops et 3 jours de sessions plénaires et de présentations de posters.
C’est dans ce cadre que notre travail dans le cadre d’ESCOD a été présenté, et plus particulièrement une partie des résultats issus de l’analyse des entretiens menés auprès des pêcheurs réunionnais à la palangre pélagique sur leur perception de la déprédation par les odontocètes. Le support de présentation était un poster présentant le contexte, la problématique et les résultats. La dernière version du dispositif PARADEP a également été présentée. Notre travail a intéressé plusieurs personnes, principalement celles impliquées dans les thèmes de la conservation.
Des échanges ont eu lieu avec des scientifiques travaillant sur les interactions négatives entre la pêche et les mammifères marins. La plupart des travaux présentés sur cette thématique concernait les captures accidentelles de mammifères marins, en particulier celles impliquant la pêche au chalut ou au filet maillant. Pour ces pêcheries, les méthodes de mitigation utilisées sont essentiellement des dispositifs acoustiques et PARADEP ne présente pas d’intérêt pour elles. Néanmoins, une équipe travaillant sur la déprédation impactant les pêcheries artisanales dans les Canaries (ligne à main, palangre, canneur) pourrait potentiellement être intéressée par PARADEP lorsqu’une version commercialisable sera disponible.
Une information intéressante est ressortie des différents échanges : la déprédation par les mammifères marins est absente de la zone Méditerranée centrale comprise entre le Portugal et l’Italie. Elle impacte surtout les pêcheries opérant dans la Méditerranée orientale (Sicile, Chypre, Grèce), la zone des Canaries, le détroit de Gibraltar ou les côtes marocaines. Par ailleurs, les principales espèces impliquées dans la déprédation sont les petits delphinidés, l’orque et le faux-orque.
Enfin, la partie Atlantique orientale bordant les côtes portugaises (notamment) sont une zone de cooccurrence des globicéphales noirs et tropicaux, et il semble que ces deux espèces ne soient pas impliquées, ou très peu, dans la déprédation (contrairement à l’Atlantique occidentale bordant les côtes brésiliennes, où le globicéphale tropical fait partie des déprédateurs des pêcheries palangrières pélagiques). Ces informations sont particulièrement intéressantes pour le projet ESCOD et la comparaison avec la déprédation impactant la pêcherie palangrière réunionnaise dans l’Océan Indien.
Notre participation à cette conférence a été l’occasion de faire connaître nos thématiques de recherche à d’autres équipes européennes, de collecter des informations sur l’occurrence de la déprédation et les espèces impliquées, et d’identifier des pêcheries qui pourraient utiliser le dispositif PARADEP.
Le poster présenté peut être téléchargé à cette adresse.
Livret d’éco-sensibilisation aux interactions pêcheries-mégafaune marine
Au cours du projet ESCOD, un livret d’éco-sensibilisation aux interactions mégafaune-pêcheries palangrières a été conçu à l’intention des professionnels. Ce livret reprend différentes informations collectées auprès de diverses sources, et rassemblées dans un seul document que les professionnels peuvent prendre à bord de leur bateau. La partie Déprédation aborde différents thèmes :
- Présentation de la déprédation et des déprédateurs
- Identification des odontocètes régulièrement rencontrés par les pêcheurs (et responsables ou non de la déprédation)
- Clés d’information sur l’écologie des odontocètes déprédateurs
- Clés d’information sur la transmission de la déprédation
- Techniques de réduction des impacts de la déprédation
- Présentation de PARADEP
La partie Captures accidentelles aborde la problématique du bycatch de mégafaune protégée, des mesures d’atténuation des captures et des techniques de libération des différents groupes en cas de contact.
Le livret peut être téléchargé à cette adresse.
Stage Célya Martial
Dans le cadre de son stage (https://paradep.com/tests-des-dispositifs/), Célya Martial a mené des entretiens auprès de professionnels en parallèle de ses activités sur les tests de l’innovation PARADEP. Au cours de ces entretiens, elle a recueilli des variables sociologiques et elle a mené des entretiens semi-dirigés afin d’évaluer leur perception 1) de la déprédation passée et actuelle, 2) des requins et mammifères marins avec lesquels ils interagissent, sonder leurs connaissances sur la biologie et l’écologie de ces prédateurs et des enjeux de conservation dont ils font l’objet, leur ressenti subjectif sur les pertes qu’ils subissent, leurs pratiques de pêche et les méthodes qu’ils mettent en œuvre pour limiter les interactions, 3) leur avis sur l’utilisation de PARADEP.
Ce savoir des pêcheurs, malheureusement souvent sous-estimé, est pourtant précieux car il s’est construit sur des expériences de long terme, fruit d’échanges dans un réseau restreint et bien souvent inaccessibles autrement que via des interviews. Elles permettent donc d’acquérir de nouvelles connaissances sur les itinéraires, les pratiques de pêche et les stratégies des pêcheurs face à la déprédation.
Cependant, compte tenu de l’arrivée tardive des dispositifs et de la date de fin de projet, seuls 4 interviews ont pu être menés. Les données collectées durant ces interviews seront analysées avec celles d’entretiens menés au cours de précédents programmes et feront l’objet d’une publication scientifique à venir.
- Published in ESCOD, Non classé, paradep
Présentation du projet ESCOD
La mitigation des conflits pêcheries représente un défi majeur pour les scientifiques, les professionnels et les décideurs de la gestion des pêcheries.
Cependant, la difficulté de développer des solutions efficaces à la déprédation est liée à la complexité et la diversité des enjeux que ce type de conflit implique. En effet, la déprédation affecte à la fois l’Homme et l’environnement, et sa résolution nécessite une approche de recherche interdisciplinaire et reposant sur une collaboration entre scientifiques, professionnels et gestionnaires. Cette approche permet la compréhension des attitudes et perceptions de la profession vis-à-vis du conflit, et en stimulant la représentation de ses savoirs et sa collaboration avec les scientifiques, est essentielle à la mitigation.
L’objectif du projet ESCOD est de communiquer sur les conflits d’usage entre prédateurs de la mégafaune marine (requins et mammifères marins) et les activités de pêche palangrière pélagique côtière et hauturière. On se propose d’effectuer un transfert de connaissances sur les interactions négatives entre les activités de pêche et la mégafaune marine en général. On s’attachera en particulier à sensibiliser les professionnels à la déprédation par les mammifères marins et les requins. Il s’agira de vulgariser selon divers modes de communication les informations scientifiques obtenues dans la littérature sur cette problématique à l’intention du public visé par la démarche. Cela permettra de communiquer sur les mécanismes de la déprédation (indices utilisés par les prédateurs pour repérer l’engin de pêche, processus de la déprédation…). Il s’agira également de donner des clés d’identification des espèces impliquées et de diffuser des informations importantes sur l’écologie des prédateurs, et sur les mécanismes de transmission de la déprédation entre les différents individus et groupes sociaux. En ayant accès à l’ensemble de ces différentes données, les professionnels pourront mieux appréhender la déprédation et améliorer leur compréhension des processus sous-jacents à ce phénomène.
Nous communiquerons également sur les enjeux économiques, écologiques et de conservation associés à ces interactions. Nous aborderons en particulier la thématique des captures accidentelles de mammifères marins et requins, conséquence directe de la déprédation. Il s’agira notamment de sensibiliser les pêcheurs aux bonnes pratiques à mettre en œuvre en cas de capture d’une espèce protégée, pour maximiser les chances de survie de l’individu capturé.
Les trois sous-objectifs du projet sont les suivants :
– Perception du phénomène de déprédation : L’objectif de ce volet sera de recueillir le ressenti des professionnels face à la déprédation et leur donner la parole puisqu’ils sont les premiers impactés par ce conflit.
– Eco-sensibilisation à la réduction de la déprédation : Techniques opérationnelles (méthodes simples que les pêcheurs peuvent adopter en routine au cours de leurs campagnes de pêche pour réduire les interactions avec les prédateurs et les impacts de la déprédation) et protection physique des captures (enjeux du projet PARADEP et mise en œuvre en routine de l’innovation PARADEP).
– Eco-sensibilisation aux captures accidentelles de mégafaune protégée : Mesures et techniques opérationnelles pour réduire ces interactions
Restitution et fin de projet
Une journée de restitution des résultats du projet PARADEP a été organisée le 8 Juin 2023 à la Réunion par la Direction de la Mer du Sud de l’Océan Indien (DMSOI), le Comité Régional des Pêches Maritimes et de l’Environnement Marin (CRPMEM) et des chercheurs et ingénieurs IRD permanents et CDD de l’UMR MARBEC. Cette journée a réuni une cinquantaine de personnes des parties prenantes du système pêche réunionnais (pêcheurs, armateurs, organisations professionnelles, gestionnaires, politiques, scientifiques). Au cours de cette restitution, les résultats du projet PARADEP, qui a pris fin le 30 juin 2023, ont été présentés.
Les décideurs, scientifiques et gestionnaires ont évoqué les questions de conservation et l’intérêt d’un dispositif d’atténuation de la déprédation pour réduire à terme les habitudes des odontocètes à venir déprédater. Les pêcheurs ont aussi fait part de leur intérêt à voir développé un dispositif d’atténuation performant mais avec l’exigence que sa mise en œuvre n’entraine que peu de modifications des pratiques de pêche actuelles.
A l’issue du projet, il s’avère nécessaire de poursuivre le développement de l’innovation PARADEP et d’améliorer le design, la conception et l’ergonomie du prototype sur la base des résultats des essais. Des demandes de financements ont donc été déposés pour un éventuel projet PARADEP 2 qui permettrait de finaliser le développement du dispositif et de parvenir à un dispositif au stade opérationnel qui pourrait inciter un fabricant et un distributeur pour la phase commercialisation de PARADEP.

- Published in paradep
Analyses acoustiques
La compréhension du comportement de déprédation et la conception d’un dispositif censé l’atténuer implique une meilleure compréhension de l’écologie comportementale des prédateurs à proximité des engins de pêche. Dans cet objectif, des hydrophones ont été régulièrement déployés au cours de marées commerciales afin d’acquérir des données sur la signature acoustique des odontocètes interagissant avec la palangre. Dans le cadre du projet DéCLIC (Développement d’un Classificateur pour l’Identification des Cétacés du sud-ouest de l’Océan Indien), l’association Globice a effectué une analyse acoustique des clics et sifflements émis par les odontocètes enregistrés par ces hydrophones, afin de mieux comprendre la déprédation, identifier précisément les espèces impliquées et enregistrer les espèces responsables de la déprédation pour enrichir le classificateur pour le sifflement d’odontocètes.
Les résultats de ces analyses indiquent que les globicéphales ou les pseudorques sont détectés dans 46% des enregistrements et dur 61% des palangres avec déprédation. La majorité du temps, aucun sifflement n’a été enregistré, mais seulement des clics. Ces clics sont associés à un comportement d’alimentation En outre, un nombre important d’occurrences de petits delphinidés ont également été enregistrés.
Malheureusement, aucun enregistrement n’a été possible lors des 2 marées au cours desquelles les dispositifs ont été déployés.
- Published in paradep
Tests des dispositifs
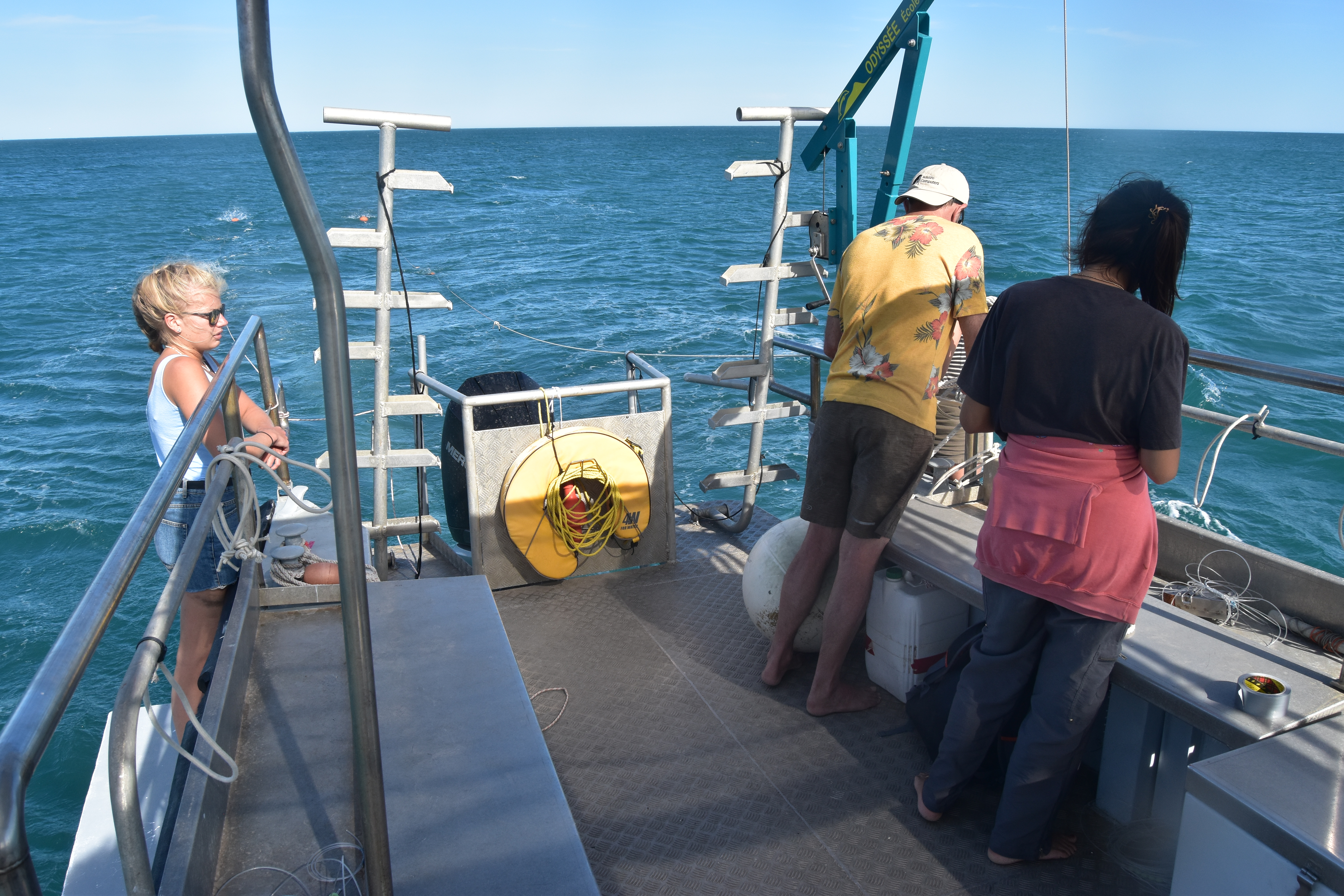
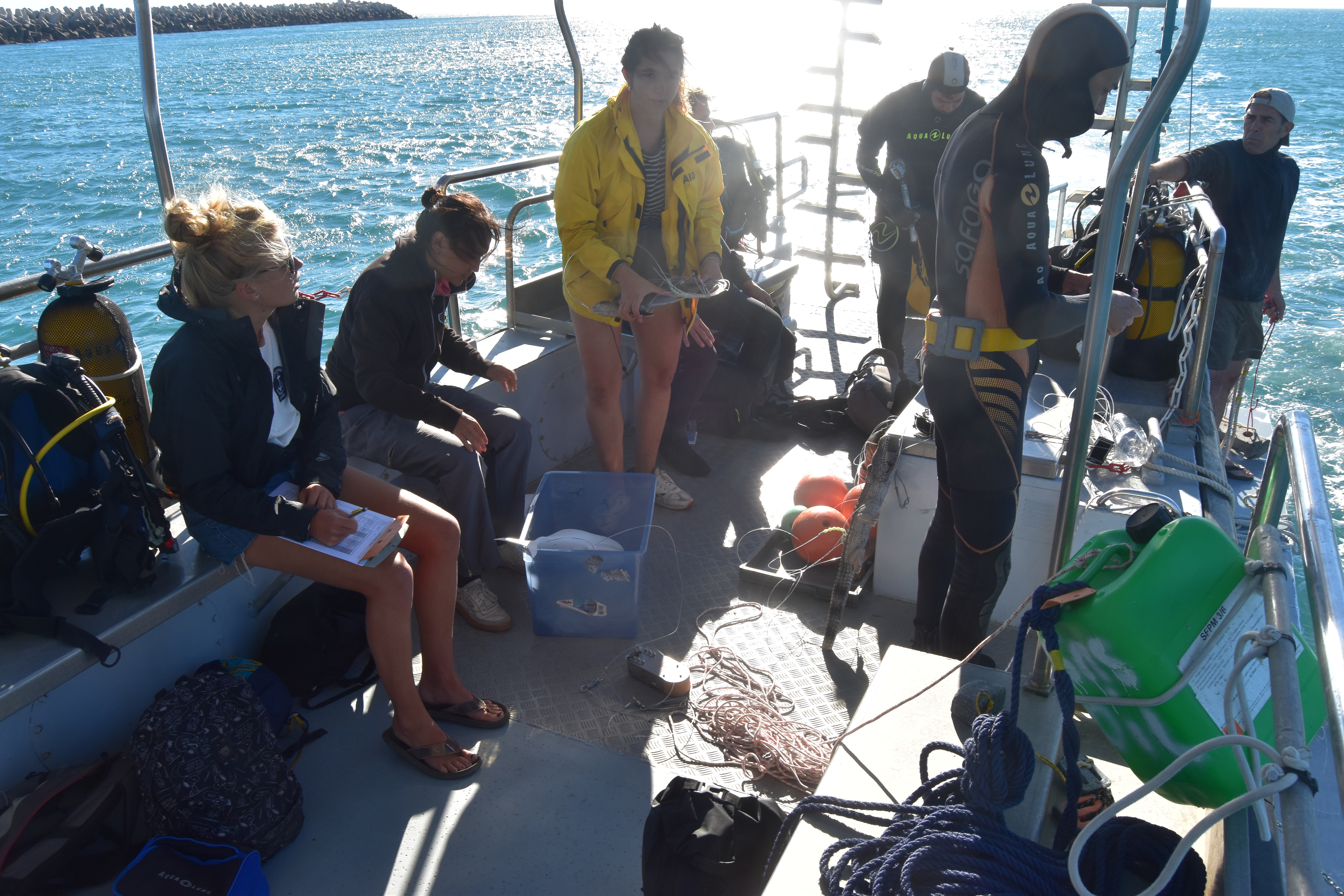
Les nouveaux dispositifs ont été produits en série fin 2022 (300 prototypes au total) et ont été testés en conditions opérationnelles à bord de palangriers au cours de 2 marées : une première marée en Mars 2023 à bord d’un catamaran de notre partenaire ENEZ DU (73 dispositifs embarqués, 20 jours dans le Canal du Mozambique et dans les Glorieuses) et une seconde marée en Mai 2023 à bord d’un monocoque (20 dispositifs embarqués, 3 jours dans les eaux de La Réunion). Les embarquements ont été réalisés par Célya Martial (ingénieure stagiaire halieute à l’Institut Agro de Rennes), aidée au cours de la première marée par Nicolas Guillon, observateur embarqué. Le protocole de déploiement a consisté à répartir les dispositifs sur les premières sections de la palangre afin de comparer l’effet de leur présence sur la capturabilité et la déprédation avec les sections sans dispositifs. Les dispositifs ont été préparés en amont par Célya à partir d’avançons rangés dans une caisse, et les avançons ainsi équipés ont été transmis aux matelots chargés de les accrocher et de les mettre à l’eau.
Au total, 7 filages avec déploiement de dispositifs ont été réalisés au cours de la première marée, et 1 filage avec dispositifs au cours de la seconde marée. Au total, 229 avançons ont été équipés et 5 poissons ont été capturés sur des avançons équipés de dispositifs.
Le bilan des tests a été mitigé pour différentes raisons, et même si la conception du dispositif a été simplifiée, des difficultés de prises en main ont tout de même été constatées :
- les boîtiers s’ouvrent souvent de façon intempestive (sans capture) pendant le filage et le virage
- les boîtiers sont relativement fragiles (pertes du couvercle, soudures à renforcer)
- l’installation et la désinstallation des dispositifs conduisent à un ralentissement du filage et du virage
- le passage de l’avançon dans le mousqueton reste compliqué
- le système de taquets destiné à fixer le dispositif sur l’avançon est inopérant
- l’avançon se tord au fur et à mesure que le dispositif est utilisé
- l’opération de filage est rendue plus compliquée et nécessite la présence d’une main d’œuvre supplémentaire
- les captures sont mal protégée par les filets qui ne sont pas assez couvrants
Le principal problème soulevé lors de ces tests est la perte d’une grande partie des dispositifs embarqués (perte en mer ou dispositifs rendus inopérants car perte de couvercle, points de soudure qui lâchent…). Il a même été nécessaire de renforcer les étuis avec du serflex au cours de la première marée. Ces tests ont cependant permis à l’innovation PARADEP d’être en passe d’atteindre le niveau 5, qui correspond à la validation dans un environnement significatif sur l’échelle TRL (Technology Readiness Level, ou degré de maturité technologique).
Néanmoins, ces tests ont permis de mieux appréhender l’utilisation de nos dispositifs en conditions commerciales et identifier les points critiques qui doivent impérativement être modifiés avant la mise sur le marché d’un prototype opérationnel (correspondant au niveau maximal 9 sur l’échelle TRL : système réel prouvé à travers des opérations réussies).
- Published in Non classé, paradep
Dernière version de PARADEP
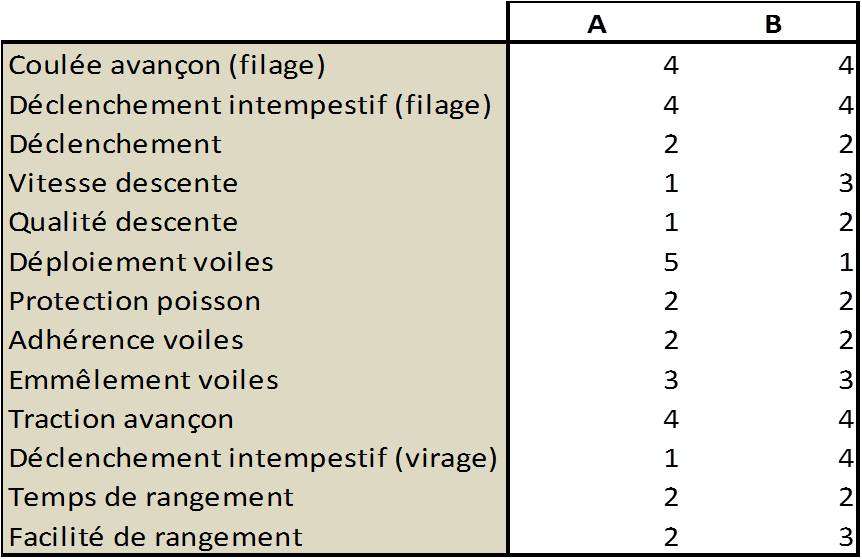
Suite aux résultats des essais des précédents prototypes du dispositif PARADEP (pour rappel, 5 étuis et une vingtaine de filets au total ont été testés au cours du projet), une version finale tenant compte des limitations précédemment identifiées a été produite et testée en conditions commerciales à La Réunion. Ce nouveau dispositif se compose d’un étui cylindrique fabriquée par injection plastique et de deux filets tricotés rectangulaires en polyester attachés à un mousqueton spécialement développé pour le projet. Plusieurs points ont été améliorés par rapport aux versions précédentes, notamment :
- la taille de l’étui a été réduite et se rapproche maintenant des dimensions d’une demi-canette de soda (7 cm de hauteur et 8,5 cm de diamètre)
- le système d’attache de l’étui à l’avançon a été simplifié et prend maintenant la forme de taquets
- le mousqueton a été amélioré et répond davantage aux attentes des professionnels en termes de facilité d’utilisation
Le filet retenu est celui précédemment testé à La Réunion (lien), pour lequel nous avons validé le comportement et la densité. C’est d’ailleurs la faible densité de ce nouveau filet qui nous a permis de réduire drastiquement la taille de l’étui, tout en conservant la même surface de protection. L’amélioration la plus notable repose donc sur cette réduction des dimensions générales du dispositif et de sa prise en main facilitée comparativement aux prototypes précédents.
Le dispositif étant en cours de déclaration d’invention, les photos détaillées du nouveau dispositif seront mises en ligne ultérieurement.
- Published in Non classé, paradep
Workshop – Protection des captures contre la déprédation par les mammifères marins
Le premier workshop international sur la protection des captures impactées par la déprédation par les mammifères marins a eu lieu en ligne le 9 février 2022. Ce groupe de travail organisé par l’International Pacific Halibut Commision a rassemblé plusieurs chercheurs, ingénieurs, pêcheurs, gestionnaires et universitaires travaillant sur différentes interactions entre pêcheries et prédateurs supérieurs. De nouvelles approches pour protéger les poissons capturés sur les engins de pêche ont été présentées auprès d’un large auditoire. L’objectif de ce workshop a été d’échanger des informations sur les outils et les approches qui ont fait leurs preuves (ou non), et de réfléchir à des idées et des concepts nouveaux ou modifiés à tester sur le terrain.

Le programme du workshop est accessible à ce lien :
Le rapport issu de ce workshop est disponible ci-dessous :
L’enregistrement du webinaire est également disponible et visionnable sur le site de l’IPHC : https://www.iphc.int/venues/details/1st-international-workshop-on-protecting-fishery-catches-from-whale-depredation-ws001
Nous remercions le Dr Claude Dykstra, chercheur à l’IPHC, pour nous avoir invités à présenter les avancées du projet PARADEP (présentation visible dans l’enregistrement ci-dessus).
- Published in Non classé, paradep
Tests du filet final (mission de Marc Soria – Février 2022)

Plusieurs filets différents ont été testés depuis le début du projet PARADEP, mais aucun d’entre eux n’a donné satisfaction en termes de comportement et/ou de déploiement :
- lin (non conçu pour une utilisation en milieu marin)
- monofilament (se détend, s’emmêle et ne se déploie pas comme attendu)
- plusieurs modèles de filets en PEHD (trop rigides et trop volumineux)
- polyester (trop volumineux)
- nylon (trop volumineux)
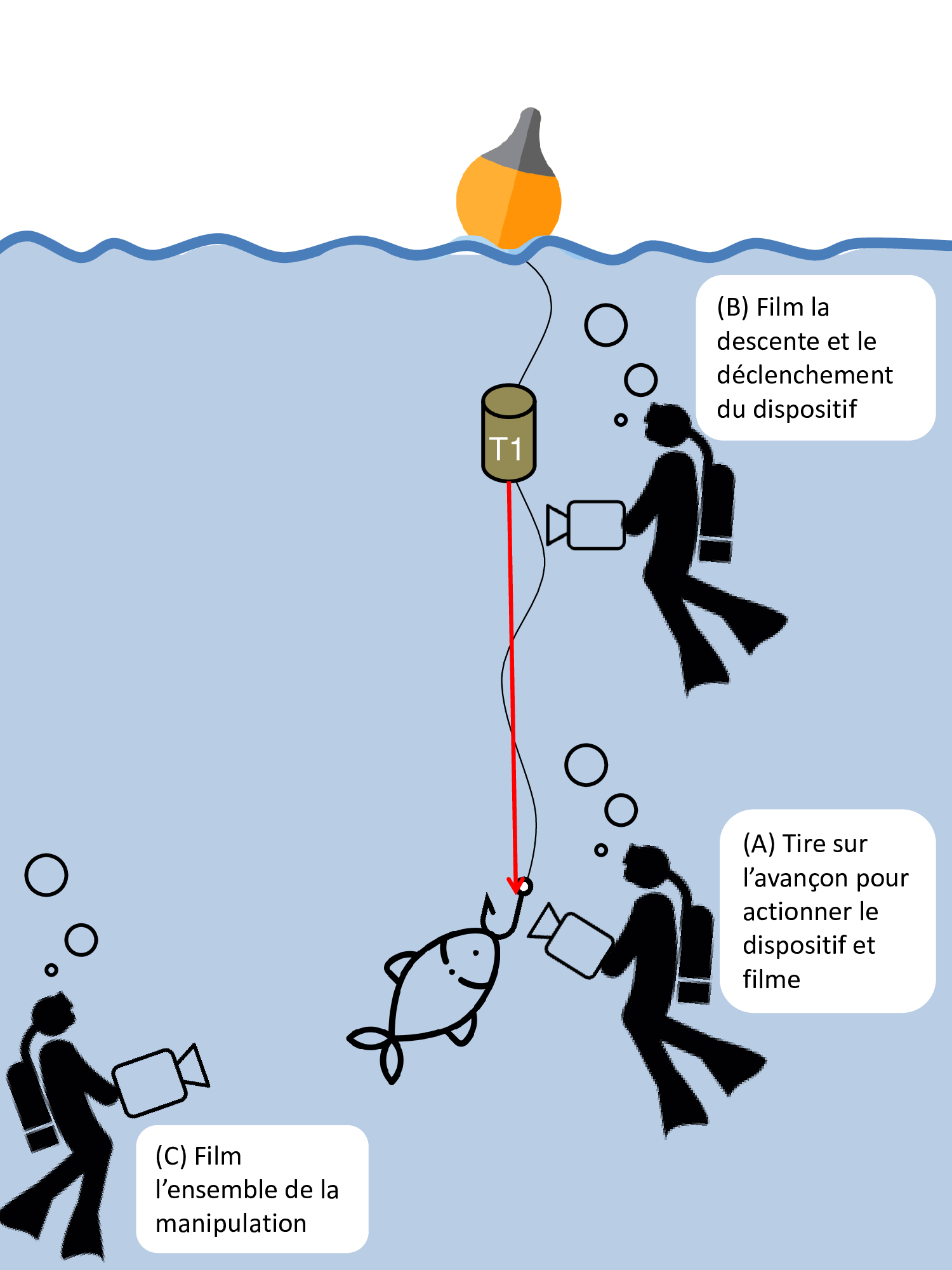
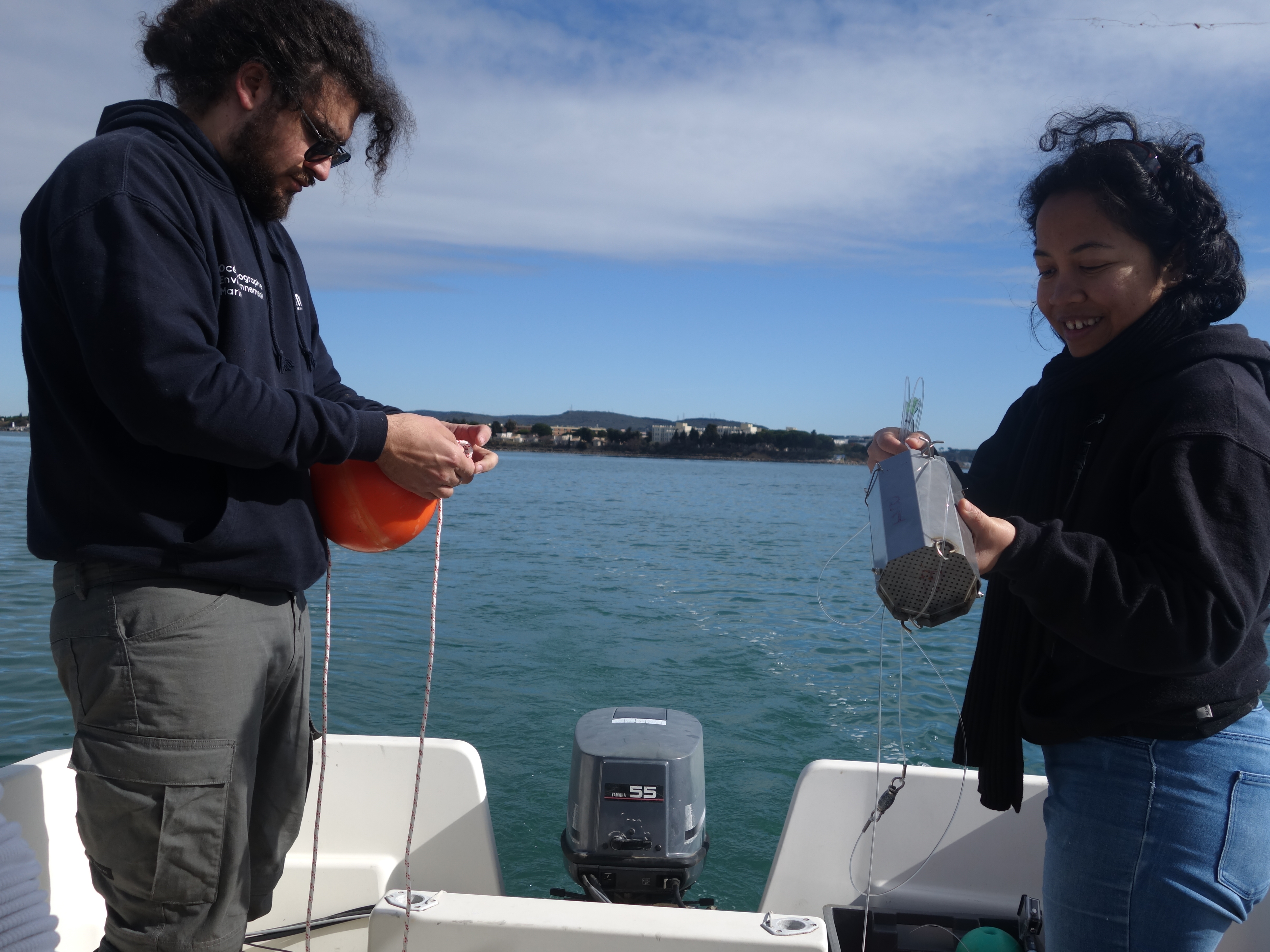
Le test des nouveaux filets fournis par l’entreprise DMR Rubans (http://www.dmr-rubans.com) a eu lieu le 09 Février 2022 au large du Port (La Réunion). Deux modèles de filets en polyester à faible densité ont été testés. L’objectif de ces dernières expérimentations a été d’étudier le comportement de ces filets au cours de leur descente le long d’un avançon de 15m. Ces tests ont été réalisés par deux plongeurs équipés de caméras, qui ont enregistré des images de leur déploiement. Le club de plongée Dodo Palmé (https://dodopalme.fr/) a fourni les moyens logistiques et l’appui humain à Marc Soria pour mener les tests des éperviers.
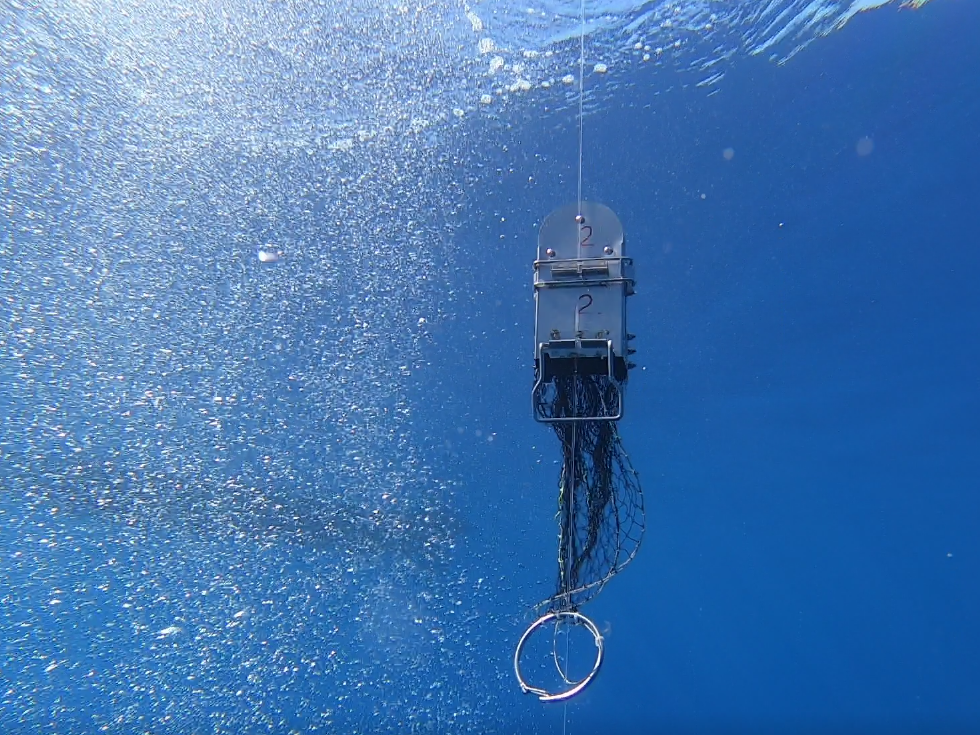
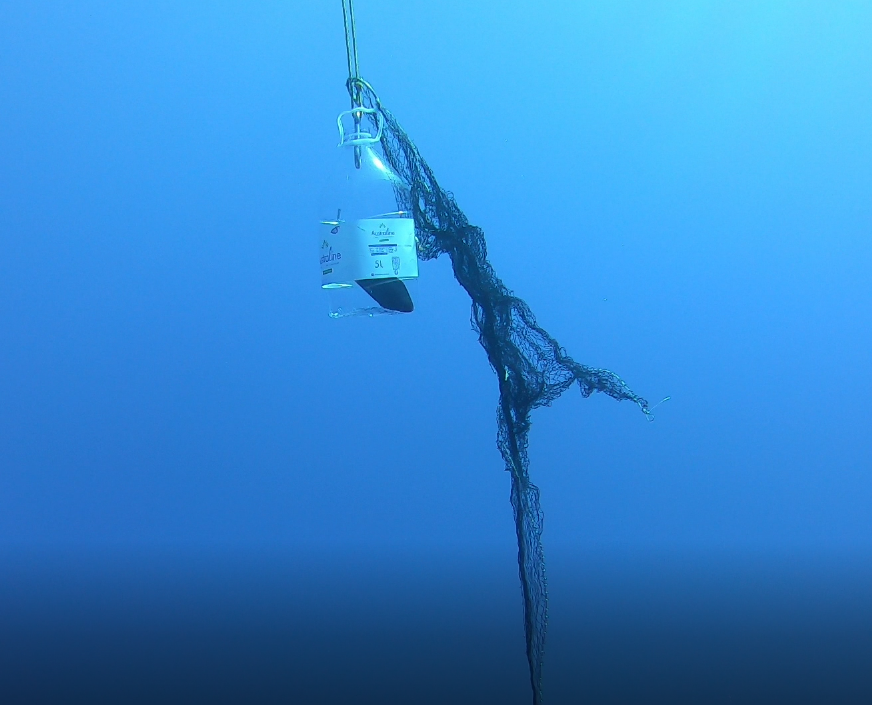
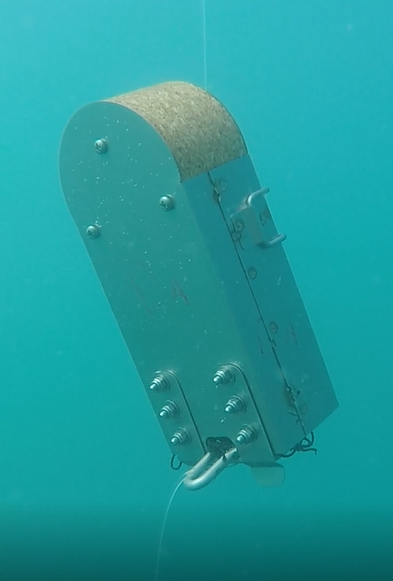
Quatre modèles d’éperviers pour trois tailles de voiles différentes ont été conçues. Le détail des différentes configurations sont spécifiées dans le rapport de mission . Lors des tests, chaque épervier a été rangé dans une boite métallique attachée à un avançon d’une longueur de 15m, lui-même attaché à une bouée au moyen d’un snap. L’ensemble du système a ensuite été mis à l’eau. Sous l’effet de la gravité et du poids du mousqueton, l’épervier est extrait de la boîte et coulisse le long de l’avançon. Deux plongeurs équipés de caméras ont filmé la descente de l’épervier le long de l’avançon : un plongeur en a suivi le comportement durant la descente, l’autre plongeur a filmé l’expérimentation en plan large.
La descente des éperviers est fluide et les voiles, du fait de leur légèreté, sont entraînées par le mousqueton qui sert de lest (vidéo de la descente à la fin de l’article). Les voiles évoluent librement, et ne sont pas solidaires l’une de l’autre, à l’inverse du PEHD. Au cours de 3 descentes d’épervier sur les 5 opérées, les mailles avaient tendance à se prendre sur le bout de l’avançon qui ressort du sleeve. Il est donc important de noter que le moindre élément qui pourrait dépasser sur l’avançon pourrait entraîner un emmêlement du filet. Cependant, il est possible qu’avec le courant ou les mouvements du poisson, le filet se libère par lui-même.
Des essais portant sur la résistance des filets ont été menés, en tirant fortement dessus pour les déchirer. Le filet mono-brin s’est déchiré sans difficulté. En revanche, le filet double-brin a été beaucoup plus résistant et ne s’est pas déchiré. Ainsi, même si le filet mono-brin est plus fin et occupe un moindre volume, nous retiendrons le filet double-brin pour le prototype final pour sa solidité.
Le filet double-brin fourni l’entreprise DMR Rubans a répondu aux attentes du projet et permet une réduction significative du volume occupé et de la taille de l’étui, induisant de fait une simplification et une miniaturisation du prototype final (v4) qui sera conçu par la SATIM.
Le rapport détaillé de la mission et des résultats est téléchargeable ici :
- Published in Non classé, paradep
Flyers du projet

Des flyers de présentation du projet PARADEP ont été conçus et sont librement téléchargeables. Ces flyers à l’intention des professionnels, des décideurs, des scientifiques et du grand public présentent les enjeux de la déprédation, les objectifs du projet et la description du prototype (version non finale).
- Published in Non classé, paradep
Etude de l’acceptabilité d’une nouvelle technologie par les pêcheurs
Dans le cadre de son stage, Jordane Limonet a effectué une mission à La Réunion du 19 au 30 septembre 2021. L’objectif de cette mission a été de mener des interviews auprès de pêcheurs professionnels, sur la base de la grille d’entretien qu’elle a conçue au cours de son stage. Cette grille d’entretien porte sur différentes rubriques : le métier de pêcheur, la connaissance et la perception de la déprédation et les techniques de réduction de la déprédation. Des variables sociologiques ont également été enregistrées.
En tout, 15 entretiens d’une durée de 30 minutes à 1h30 ont été menés auprès de capitaines de pêche. Les entretiens ont été menés à bord des bateaux ou sur le port de pêche. Tous les pêcheurs interrogés sont professionnellement basés dans la ville du Port.
Les données seront exhaustivement exploitées prochainement. Des résultats préliminaires sont néanmoins disponibles dans le rapport de mission de Jordane, téléchargeable ci-dessous :
Jordane a pu mener à bien ses entretiens grâce à l’aide précieuse de l’armement ENEZ, NEXA-CITEB et le CRPMEM. Nous les remercions chaleureusement pour leur collaboration.
- Published in Non classé, paradep
Stage de Jordane Limonet (19/04/2021-30/09/2021)

Jordane Limonet, étudiante Intechmer, a effectué son stage de fin d’études dans le cadre du projet PARADEP pour l’obtention de son diplôme de cadre technique Génie de l’environnement marin. Plusieurs tâches lui ont été confiées :
- analyse des vidéos des essais des prototypes V3_2 menés à La Réunion en mars 2021
- participation à la recherche d’un nouveau matériau pour la réalisation des éperviers, les précédents filets testés n’ayant pas été satisfaisants
- préparation d’une mission à La Réunion sur la question de l’acceptabilité d’une nouvelle technologie par les pêcheurs
Analyse des vidéos des essais des prototypes V3_2
L’analyse des vidéos fait suite à la mission de Marc Soria menée à La Réunion en collaboration avec Nicolas Guillon (Nexa-CITEB) et le Dodo Palmé. A l’issue de ce travail, Jordane a pu comparer les versions V3_1 (testée en juillet 2020) et V3_2 (testée en mars 2021) des prototypes et apprécier les améliorations apportées sur le dernier modèle. Parmi les améliorations constatées, une ouverture plus fluide de l’étui, une meilleure flottabilité, un meilleur maintien du boîtier sur l’avançon est assuré par une lame-ressort qui a subi une rigidification et aux encoches réalisées au dos du boîtier qui maintiennent davantage l’avançon. La forme du mousqueton a également été modifiée, permettant une meilleure sortie des éperviers. En revanche, des modifications doivent encore être apportées au boîtier afin d’améliorer sa maniabilité. Des modifications du système d’ouverture du mousqueton et de sa rigidité sont encore indispensables, ainsi que la modification du système d’accroche sur l’avançon. Par ailleurs, le PEHD, matériau choisi pour la conception des éperviers, est trop rigide pour satisfaire les fonctions du dispositif. Par conséquent, les filets restent repliés sur eux-même lorsqu’ils sortent du boîtier et ne se déploient pas.
Recherche d’un nouveau matériau pour les filets éperviers
Compte tenu de l’inadéquation du matériau choisi, Jordane a prospecté des fournisseurs en industrie textile afin d’obtenir des échantillons de filets en nylon. Elle a testé le comportement dans l’eau des échantillons obtenus. Des sorties en mer ont donc été organisées afin de tester le comportement de déploiement et de recouvrement des filets avec l’association Odyssée (https://www.odyssee-sub.org). L’analyse des vidéos enregistrés au cours de ces différents tests a montré que les nouveaux matériaux ont montré de meilleurs résultats que le PEHD, notamment sur la question du déploiement. Ces résultats encourageants nous décident à rester sur le matériau identifié et son fournisseur. Cependant, le volume occupé par les filets reste encore trop important. Un dernier filet a été récemment identifié, et semble correspondre à nos attentes en terme de volume utile, ce qui permettra d’optimiser le rapport volume/taille de l’étui, permettant une meilleure maniabilité de celui-ci. Les tests portant sur ce dernier filet s’effectueront à La Réunion en janvier 2022.
Acceptabilité d’une nouvelle technologie par les pêcheurs
Afin de facilité l’acceptabilité d’une technologie auprès des pêcheurs, une bonne communication doit être faite en amont. Un questionnaire destiné aux pêcheurs réunionnais a donc été réalisé, et porte sur la perception de la déprédation par ces derniers et ses conséquences, et sur leur enclin à adopter ou non une nouvelle technologie pour pallier à ce problème. Le déroulement des enquêtes menées par Jordane sera abordé plus en détails dans un article à suivre.
Le rapport de stage de Jordane est accessible ci-dessous :
- Published in Non classé, paradep
Tests de la version 3_2 des dispositifs

Suite aux tests menés sur la version 3 des prototypes PARADEP en Décembre 2020, les dernières modifications précédemment requises ont été apportées à l’étui. Un nouveau modèle de mousqueton a également été produit, ce dernier étant maintenant de forme circulaire. La forme générale de l’étui n’a en revanche pas évolué. La majeure modification a porté sur le filet utilisé pour concevoir l’épervier. Pour ces tests, notre choix s’est porté sur un filet en polyéthylène haute densité (PEHD) avec des mailles de 16mm de côté. Des segments de métal ont été rajoutés aux filets afin d’en améliorer le déploiement et l’ouverture. Nous avons également modifié la forme de l’épervier et avons choisi deux voiles rectangulaires. Deux dimensions de voiles ont été testées : 100cm*80cm et 100cm*60cm.
Compte tenu des restrictions sanitaires empêchant de mener les expérimentations sur le terrain en Métropole, les tests de cette dernière version du prototype ont été menés fin Mars 2021 à La Réunion par Marc Soria, Nicolas Guillon (NEXA CITEB et collaborateur du projet, http://www.nexa.re/accueil/) et le club de plongée Dodo Palmé (https://dodopalme.fr/). Les expérimentations ont été menées au cours de 4 demi-journées. Le protocole mis en œuvre est similaire aux protocoles utilisés précédemment : 3 plongeurs se mettent à l’eau et filment le comportement des prototypes, depuis leur déclenchement jusqu’à leur descente au niveau de l’hameçon. Des tests de déclenchements intempestifs au cours de simulations de filage et de virage ont aussi été effectués.
Les vidéos sont en cours d’analyse par notre nouvelle stagiaire Jordane Limonet (3è année Intechmer, en stage dans le cadre du projet d’Avril à Septembre 2021). Néanmoins, les premiers résultats indiquent que les étuis et le mousqueton nécessitent encore quelques ajustements avant d’être pleinement fonctionnels. Ces demandes d’améliorations ont été transmises au bureau d’étude en charge de la conception du dispositif, et sont en train d’être prises en compte pour la prochaine version. Par ailleurs, le matériau choisi pour le filet montre une trop grande rigidité qui ne lui permet pas de se déployer comme nous l’attendons. Nous poursuivons donc notre recherche du filet adéquat. Un modèle que nous avons identifié comme potentiellement intéressant nous sera livré prochainement et nous pourrons alors reprendre nos tests.
Cet article sera mis à jour dès que les résultats issus de l’analyse exhaustive des images seront disponibles.
MàJ : Les résultats des analyses vidéos sont accessibles dans le rapport de stage de Jordane Limonet, téléchargeable ci-dessous :
Une vidéo du déploiement du dispositif est visible à la fin de cet article.
Nous remercions très chaleureusement les plongeurs du Dodo Palmé ainsi que Marc Soria et Nicolas Guillon pour leur participation active à ces tests sur le terrain.







- Published in Non classé, paradep
Tests de la version 3_1 des dispositifs

Les tests effectués sur les versions 1 et 2 du dispositif PARADEP ont permis de mettre en avant les améliorations à apporter pour pouvoir déployer ce dispositif sur les palangriers pélagiques. La version 3_1 du dispositif PARADEP repose sur un principe similaire et est toujours composée de 2 parties : un étui fixé sur l’avançon et une partie mobile comprenant un tore rectangulaire et deux voiles simulant la forme d’un épervier.
1. Description du prototype V3_1
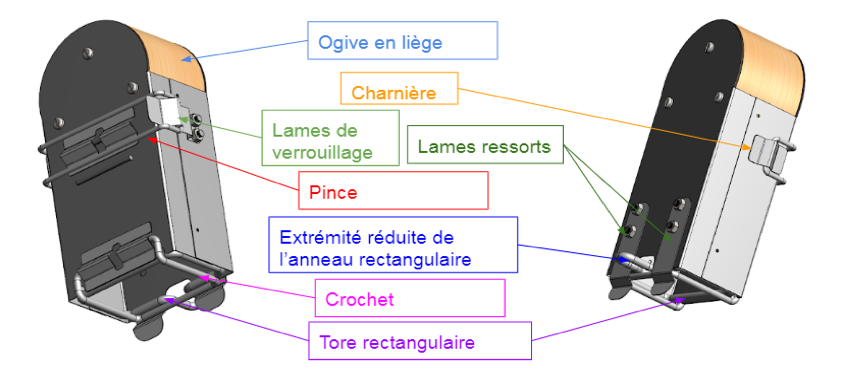
- L’étui
L’étui se présente sous la forme d’un pavé droit en acier inoxydable, avec une base de 8 cm de longueur et de 5 cm de largeur, une hauteur de 13 cm (sans l’ogive en liège qui ajoute une hauteur de 5 cm à l’ensemble). Cette taille permet une bonne prise en main du dispositif, ce qui facilite sa manipulation auprès des pêcheurs. La partie supérieure de l’étui comporte une ogive en liège de 5 cm de hauteur qui permet de compenser la flottabilité négative du dispositif dans l’eau. Ce compartiment en liège en forme de dôme favorise l’hydrodynamisme du dispositif au cours de la remontée de l’avançon pendant le virage. L’étui est fixé sur l’avançon à l’aide d’une pince qui se ferme sur une lame de verrouillage. Ce système permet une accroche rapide sur l’avançon. L’avançon est inséré dans l’étui au travers d’une fente placée sur l’extrémité réduite du tore rectangulaire. Ce dernier est rangé dans la face inférieure de l’étui qui est ouverte. La face inférieure est close par un crochet qui se verrouille sur deux lames ressorts situés sur le bas de la face avant.
- L’épervier
La partie mobile est composée d’un épervier en deux parties (inspiré de la technique de pêche éponyme), attaché sur un anneau rectangulaire métallique comprenant une extrémité réduite ouverte. L’épervier correspond à deux pièces pyramidales découpées dans un filet tricoté en polyéthylène haute densité (PEHD). Cette découpe a été privilégiée pour diminuer le volume du filet pour permettre son insertion dans l’étui. Le filet en PEHD présente plusieurs avantages : un faible coût, un poids léger, une résistance à la rupture élevée et une imputrescibilité malgré des immersions prolongées dans l’eau de mer lui conférant une certaine durabilité. De plus, le filet permet une couverture visuelle intéressante et un faible taux d’emmêlement.
La pièce pyramidale de 100 cm de base a été lestée de 60 g par des olives en plomb. Un ourlet de 10 cm en tissu polyester est cousu au bas de chaque élément pour protéger les olives en plomb et limiter le risque d’emmêlement du filet avec les olives. Cet ourlet doit également maintenir l’épervier ouvert, l’écarter de l’avançon lors de sa descente le long de l’avançon vers la capture, puis aider au plaquage de l’épervier sur le corps du poisson capturé.
Le déclenchement du dispositif se fait par une traction sur l’avançon par le poisson hameçonné, ce qui entraîne une pression de l’anneau rectangulaire sur les lames ressorts et engendre leur déverrouillage puis la libération de l’anneau rectangulaire et de l’épervier. L’anneau rectangulaire équipé de l’épervier coulisse alors le long de l’avançon jusqu’au poisson. L’épervier se déploie ensuite autour du poisson afin de le couvrir.

2. Protocole des tests
Sur une ligne mère de 35 m de long, les 6 avançons de 7,5m de longueur sont déployés à une distance de 6 mètres les uns des autres. La ligne mère est maintenue à la surface par plusieurs bouées, installées tous les deux avançons sur la ligne, pour qu’elle ne coule pas sous le poids des dispositifs. Une ancre de 15 kg est fixée sous la bouée pour immobiliser le montage. Sur chaque avançon, un exemplaire de chaque prototype de la V3 est accroché. Des maquettes de poissons en résine ont été fixés à l’extrémité des 6 avançons afin de simuler le poisson capturé. L’avançon est accroché avec un snap sur la corde en surface, faisant office de ligne mère.
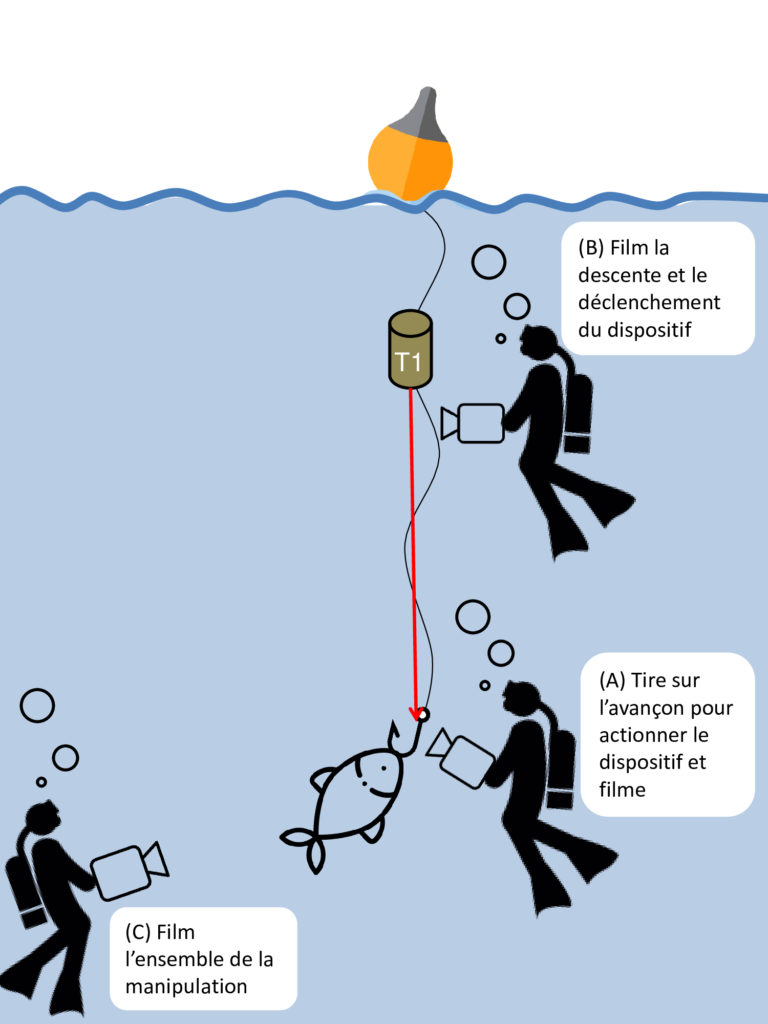
Une fois le montage immergé, trois plongeurs équipés de caméras sous-marines se mettent à l’eau. Pour chaque prototype, le plongeur (A) équipé d’une caméra filme des images du comportement du dispositif en contre-plongée. Il déclenche le dispositif en exerçant une tension sur le bas de l’avançon pour simuler une capture. A chaque déclenchement de dispositif, la partie mobile coulisse le long de l’avançon jusqu’à l’hameçon tandis que la partie fixe (étui) reste accrochée en haut de l’avançon. Le plongeur (B) filme le déclenchement et suit la descente du dispositif jusqu’à ce que l’épervier soit déployé autour du poisson. Le plongeur (C) filme l’ensemble de la manipulation pour fournir une vision globale du fonctionnement du prototype et de l’expérimentation.
Si la partie mobile (anneau + épervier) se bloque au cours de sa descente le long de l’avançon, le plongeur (B) montre à la caméra le nom du prototype et la source du blocage. Ensuite, le plongeur (A) tire à nouveau sur le bas de l’avançon pour essayer de le débloquer. Son intervention permet de vérifier si le mouvement d’un poisson capturé permettrait de débloquer le dispositif. S’il n’y parvient pas, le plongeur (B) débloque le dispositif afin de terminer le protocole.

3. Résultats des tests
- La version 3 du dispositif PARADEP se rapproche des prérequis du projet PARADEP. La taille et le poids dans l’eau de la V3 correspondent relativement bien aux critères d’acceptabilité communiqués par les professionnels de la pêche. La taille relativement petite du dispositif favorise une manipulation facile et rapide et un encombrement moindre sur l’avançon. De plus, la compensation de la flottabilité négative par le liège amoindrit le poids de la partie mobile (tore rectangulaire et épervier lesté). Le comportement du dispositif immergé était satisfaisant, celui-ci est bien resté vertical.
- Les tests ont démontré que le système d’accroche de l’étui sur l’avançon est un mécanisme rapide et simple à utiliser, mais son manque de fiabilité demande quelques améliorations. A plusieurs reprises, l’avançon s’est dérobé de sa gorge de guidage qui devait le maintenir au milieu de l’étui et a provoqué le glissement de l’étui le long de l’avançon. De même, l’étui a glissé le long de l’avançon sans que ce dernier ne soit sorti de la gorge. Dans les deux cas, le problème identifié est certainement dû aux manques de pression de la pince et de profondeur de l’encoche de maintien de l’avançon.
- Le tore rectangulaire de la V3 n’a pas pu être équipé d’un système ouverture – fermeture à ressort qui équipe classiquement un mousqueton. Le passage de l’avançon dans le tore a donc été assuré par une fente découpée dans le renflement du tore qui sort de l’étui. Cette fente augmente les risques de sortie de l’avançon ainsi que l’emmêlement de l’épervier qui passerait au travers de la fente. Un tore rectangulaire fermé équipé d’un système d’ouverture – fermeture à ressort ou équivalent par rapport aux résultats attendus s’est révélé indispensable.
- La matière des filets en polyéthylène haute densité (PEHD) s’est révélée satisfaisante, elle ne retient pas l’eau et conserve son poids après immersion. C’est une matière résistante, durable dans le temps, traitée pour être résistante aux UV et imputrescible. Cependant, le déploiement des éperviers ne s’est pas révélé satisfaisant lors des tests, cela pour plusieurs raisons : l’épervier occupe un volume trop important dans l’étui et n’en sort pas de façon fluide, la découpe des filets en forme pyramidale n’a pas permis un bon déploiement autour du poisson, l’ourlet en polyester est fragile et a tendance à se découdre et se déchirer, le lestage des éperviers est trop important et a contribué au mauvais déploiement des voiles. De plus, le dispositif a été immergé sur une courte durée. Un temps d’immersion plus long, comme ce sera le cas dans les conditions réelles de pêche à la palangre, permettrait sans doute un meilleur déploiement de l’épervier, qui sera soumis aux courants, aux turbulences et aux mouvements du poisson qui entraîneront son ouverture.
Le compte-rendu de ces tests est accessible ci-dessous :
4. Perspectives
Cette version V3 se rapproche certainement de la version finale attendue par le projet. Quelques modifications sont encore requises, mais dans l’ensemble, les spécifications déterminées dans le cahier des charges ont été respectées lors de la conception de cette dernière version de l’étui. Le travail qu’il reste à effectuer pour parvenir à une version finale du prototype concerne :
- la modification du tore rectangulaire en un système de mousqueton circulaire
- le renforcement des lames ressorts et de la pince de maintien de l’étui sur l’avançon,
- le développement d’un bourrelet pour assurer un effet levier sur le mousqueton pour l’ouverture du système de fermeture de l’étui,
- la recherche d’un filet adéquat pour l’épervier et sa conception (forme, lestage, taille et tissu pour l’ourlet), afin qu’il occupe le moins de volume possible dans l’étui tout en offrant une protection satisfaisante de la capture,
- l’ajout de segments de fil fin en acier inoxydable sur l’épervier pour en améliorer l’ouverture et la rigidité, et rajouter un effet protecteur lorsque les mammifères marins font de l’écholocation en modifiant la signature acoustique de la capture par l’utilisation de métal
La nouvelle version de l’étui tenant compte des modifications demandées a été réceptionnée mi-décembre 2020. Le filet avec la densité adéquate a également été identifié : il s’agit d’un filet en PEHD avec des mailles de 16mm de côté et un diamètre de fil de 0.8 mm. Un premier aperçu du comportement de l’étui V3_1 et du nouveau filet est visible à la fin de la vidéo suivante :
- Published in Non classé, paradep
Prolongation de la durée du projet PARADEP
Compte tenu de la crise sanitaire liée au COVID 19, et les difficultés rencontrées par l’équipe à mener les tâches liées au développement et aux tests des prototypes dans des conditions normales, le projet a été prolongé et prendra fin le 31 Décembre 2022.
- Published in Non classé, paradep
Tests des dispositifs V3_1

16/07/2020 – Tests en mer de la version #3 des dispositifs
Malgré un ralentissement lié à la crise sanitaire du coronavirus, les activités menées dans le cadre du projet PARADEP ont suivi leur cours. La dernière version (#V3) des dispositifs a été conçue durant cette période. Cette version a vu l’amélioration de l’étui et des voiles protectrices, conçues dans des filets en polyéthylène haute densité.




Les tests préliminaires de cette version ont eu lieu en mer le 16 juillet 2020 au large du brise-lames de Sète. Les expérimentations se sont déroulées à bord du bateau de plongée du club associatif Odyssée (http://odyssee-sub.org/). Le chantier de plongée a été encadré par Emmanuel Serval, président du club.
L’équipe de plongeurs était composée de 3 personnes (Philippe Sabarros, Romain Bach, Alexandre Mignucci). A bord, 5 personnes ont eu pour tâche de mettre à l’eau la palangre expérimentale, de disposer les avançons équipés des dispositifs sur la ligne-mère, de collecter les données, de prendre des images, de remonter la palangre à bord et de ranger les dispositifs (Pascal Bach, Chloé Yven, Auriane Serval, Yoluène Massey et Njaratiana Rabearisoa).
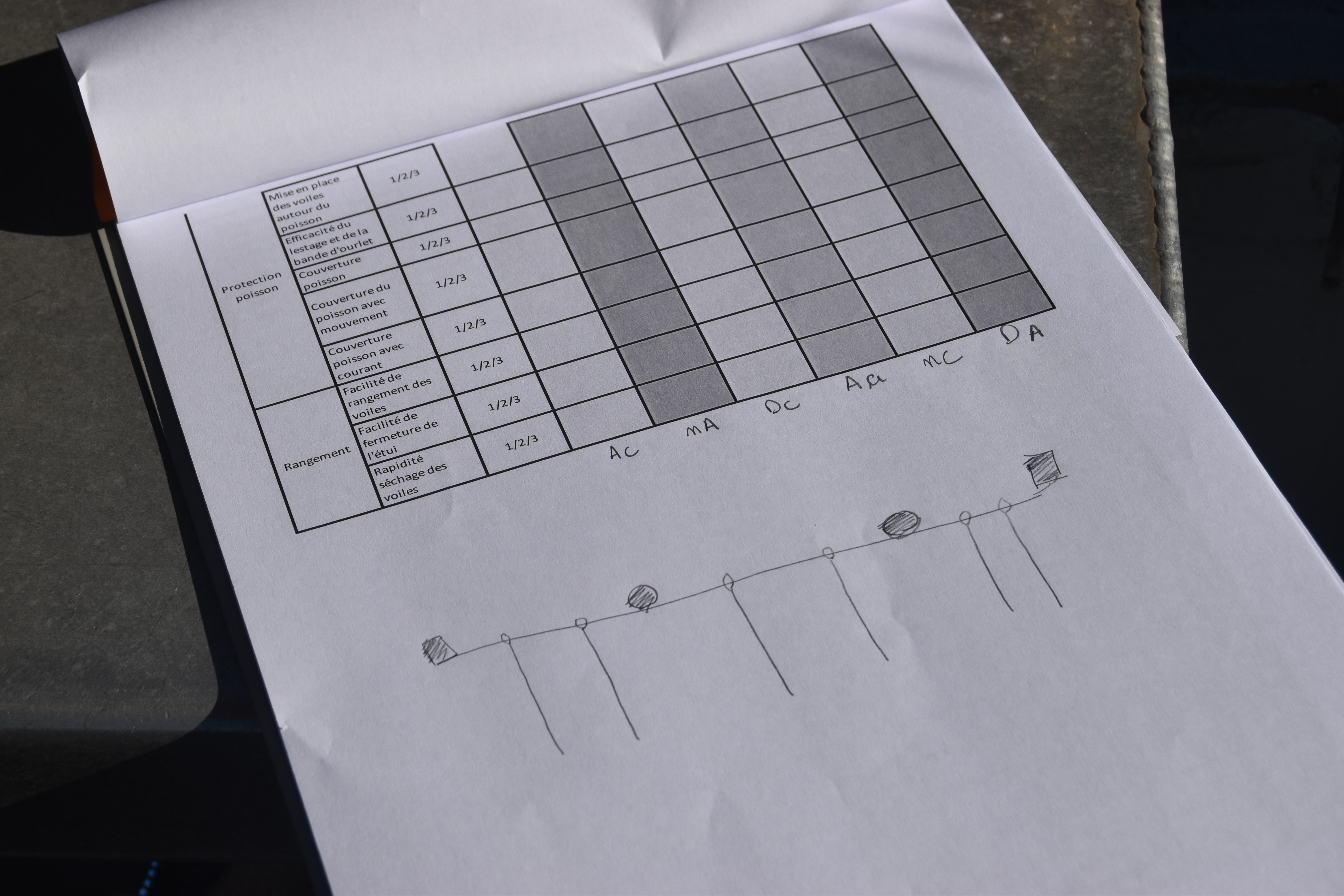
Au cours des tests, les plongeurs ont déclenché 6 dispositifs sous l’eau en simulant une capture de poisson à l’extrémité de l’avançon, et ont filmé leur comportement. Plusieurs critères ont été évalués pour chaque prototype au cours de ces expérimentations : déclenchement, manipulation, descente, couverture du poisson, rangement,… Les résultats issus de ces tests sont accessibles sur l’article suivant : https://paradep.com/retour-sur-les-tests-de-la-version-3-des-dispositifs/










L’équipe PARADEP tient à remercier toutes les personnes pré-citées, qui ont permis que les expérimentations se déroulent dans les meilleures conditions.
- Published in Non classé, paradep
Stage de Chloé YVEN

Chloé YVEN est étudiante en 3è année Génie de l’environnement marin à l’Institut National des Sciences et Techniques de la Mer (Intechmer) à Tourlaville. En raison de la crise sanitaire liée au coronavirus, elle a débuté son stage en télétravail début mai, et a rejoint l’équipe PARADEP en présentiel fin juin à Sète. Son sujet de stage porte sur la conception des filets de protection de la version 3 des dispositifs anti-déprédation et leurs tests sur le terrain au large de Sète. Si l’occasion se présente, elle embarquera également sur des palangriers de la région pour tester les dispositifs en conditions de pêche. Elle terminera son stage le 4 septembre 2020.

- Published in Non classé, paradep
Présentation de PARADEP au Lycée de la Mer à Sète

10/03/2020 : Une présentation du projet PARADEP a eu lieu au Lycée de la Mer (http://www.lyceedelamer.fr/) auprès d’une classe de BTS en Pêche et Gestion de l’Environnement Marin.

Lycée de la Mer Paul Bousquet – Sète
Au cours de cette intervention d’une heure et demie, Auriane et Njaratiana ont présenté les résultats sur l’ampleur de la déprédation dans l’Océan Indien, la perception de ce phénomène par les pêcheurs réunionnais et les solutions mises en oeuvre pour réduire les impacts de la déprédation, avec un accent mis sur les actions menées dans le cadre de PARADEP. Les différentes versions des prototypes de dispositifs anti-déprédation testées dans le cadre du projet ont également été présentées aux élèves.



Un extrait de la présentation d’Auriane est visible à ce lien.
Un grand merci à Alexandre Castillo et Clément Calmettes, enseignants au Lycée de la Mer, pour leur accueil chaleureux lors de cette intervention.
- Published in Non classé, paradep
Essais de la version 2 des dispositifs PARADEP

La version 2 des dispositifs anti-déprédation a été testée les 25 et 26 février 2020. Les nouveaux prototypes ont inclus une partie des modifications demandées à la fin des tests de la version 1 : les voiles en lin ont été remplacées par une combinaison de filets maillants en monofilament et de tissu en ramie, le support mobile a été remplacé par un tore métallique qui sert également de système de déclenchement, le système de fixation de l’étui à l’avançon a été remplacé par une pince ressort à l’arrière de l’étui, le système de lestage des voiles a été revu et le système d’ouverture de l’étui a été modifié.
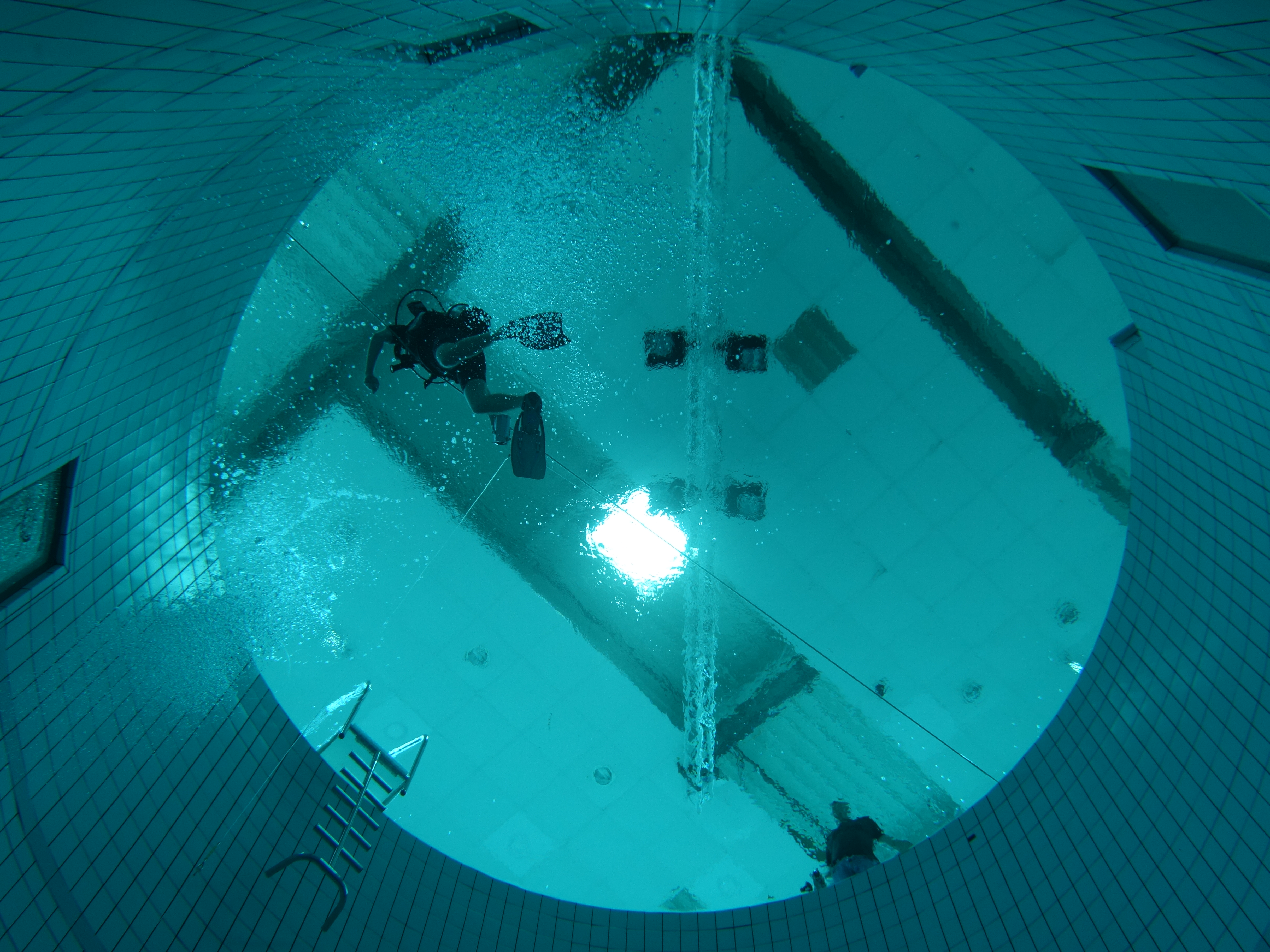
Version 2 du prototype anti-déprédation 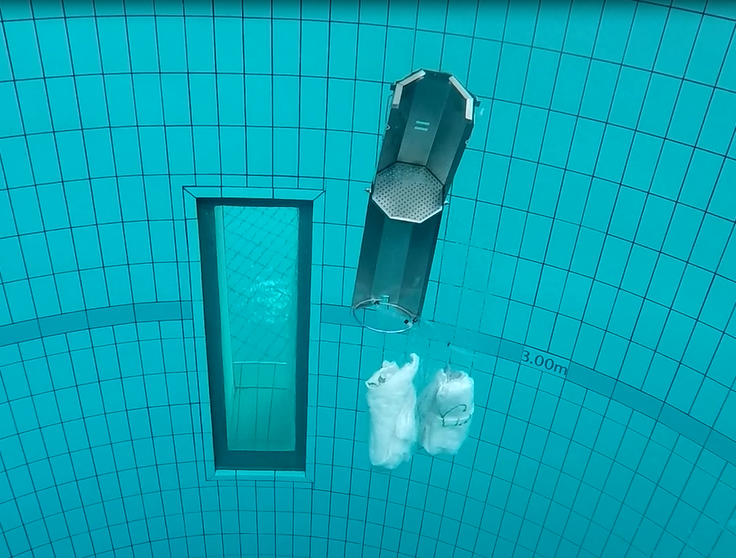
La première partie des tests s’est déroulée dans la fosse nautique Nemausa à Nîmes (https://www.vert-marine.com/nemausa-nimes-30/). Au cours de cette journée, 3 plongeurs équipés de caméras ont filmé le déploiement des dispositifs et leur descente le long de l’avançon. La seconde partie des tests s’est déroulée à bord d’une embarcation sur la lagune de Thau. Au cours de cette journée, un palangre expérimentale équipée des dispositifs a été mise à l’eau. L’objectif de ces deux journées de tests a été d’évaluer le comportement du dispositif lors de l’accrochage sur la ligne et du filage, d’analyser son déploiement (déclenchement, fluidité de la descente le long de l’avançon), la protection des voiles au moyen de moulages de poisson (déploiement et mise en place des voiles), son comportement lors du virage, l’impact de la vitesse du bateau sur le déclenchement intempestif, et le rangement du dispositif.
Configuration des expérimentations en fosse (Schéma : A. Serval) 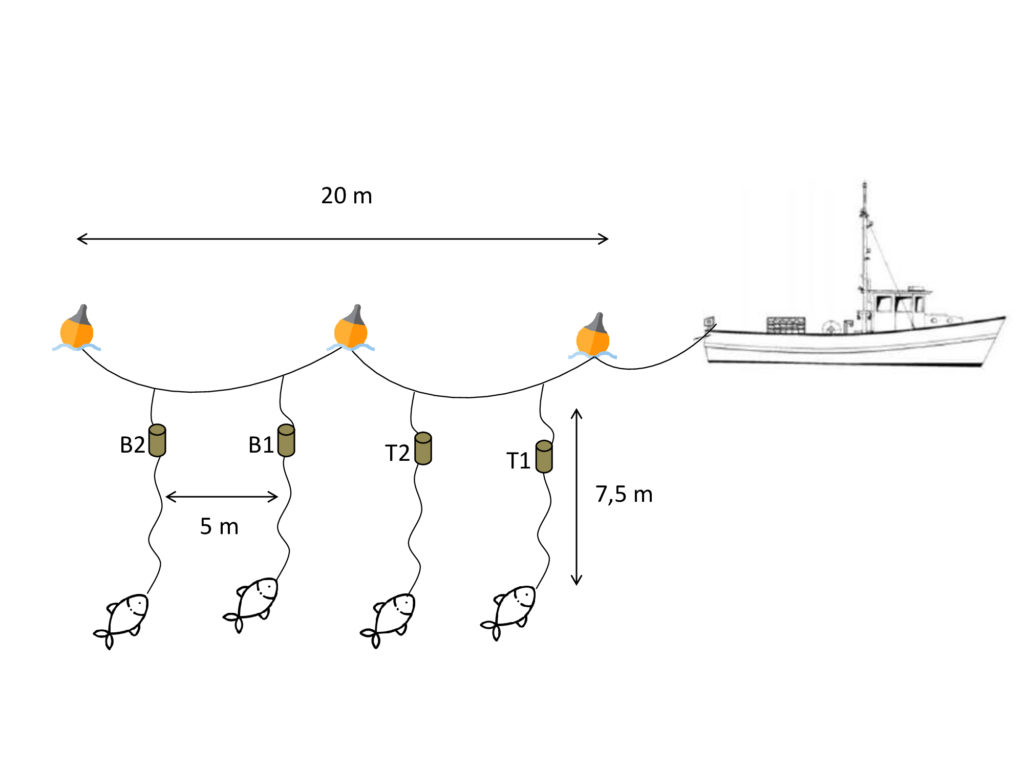
Configuration des expérimentations sur la lagune (Schéma : A. Serval)



Ces essais ont révélé d’autres points à corriger avant d’arriver à une version pleinement opérationnelle. Nous sommes actuellement en train de conceptualiser d’autres modifications à apporter au prototype et qui nous conduira à la version 3, qui sera testée prochainement. Nous nous concentrons en particulier sur les matériaux à utiliser pour la conception des voiles de protection, ainsi que la miniaturisation de l’étui et l’amélioration du système de déclenchement.
Les pilotes du projet PARADEP souhaitent remercier Auriane SERVAL, stagiaire de l’Université de Montpellier, qui s’est pleinement investie dans la mise en œuvre de ces tests, ainsi que les différents acteurs qui ont participé à ces essais. Pour les manipulations en piscine, nous remercions les 3 plongeurs : Emilie Boulanger, Romain Bach et Jules Héliou. Marc Soria pour son aide au cours des manipulations sur le bord du bassin. Luc Markiw, caméraman au service Images IRD d’avoir prêté son matériel vidéo pour filmer les manipulations. Ilan Perez pour nous avoir aidé au cours des manipulations sur le bateau. Romain Gros, de l’Université de Montpellier, qui a aidé à la logistique des expérimentations sur la lagune de Thau. Merci également au personnel du centre nautique Nemausa pour leur accueil, en particulier à Guillaume Barbotin et Annabelle Bonin.
- Published in Non classé, paradep
Début de stage – Auriane SERVAL

03/02/2020 : Début du stage de Auriane SERVAL (L3 Ecologie Bologie des Organismes, Université de Montpellier).
Sujet : Suivi des tests d’un dispositif visant à réduire la déprédation par les mammifères marins en interaction avec les pêcheries palangrières pélagiques
Contenu du stage :
Partie 1 : Sète (Février-Mars)
- Bibliographie
- Mise en place d’un protocole scientifique
- Tests de la deuxième version des prototypes de dispositifs anti-déprédation en fosse de plongée
- Analyse du comportement des dispositifs
Partie 2 : La Réunion (Avril-Juillet)
- Mise en place d’un protocole scientifique
- Tests de la version finale des prototypes de dispositifs anti-déprédation au cours d’embarquements à bord de palangriers pélagiques
- Collecte et saisie des données
- Analyse du comportement des dispositifs
- Entretiens avec les pêcheurs sur leur perception de l’utilisation des dispositifs
Encadrement : N. Rabearisoa, P. Bach
Durée : 6 mois
Lieu : IRD MARBEC, Sète et NEXA (Le Port, La Réunion)

- Published in Non classé, paradep
Présentation de PARADEP à la WMMC 2019

Le projet PARADEP a été présenté à la conférence biennale WMMC (World Marine Mammal Conference, https://www.wmmconference.org/) organisée par la Society for Marine Mammalogy (SMM) et l’European Cetacean Society (ECS) en Décembre 2019 à Barcelone. Cette conférence internationale vise à rassembler les chercheurs, étudiants et industriels travaillant sur des sujets très divers ayant trait aux mammifères marins (écologie, comportement, conservation, physiologie…). Au total, environ 600 présentations orales et 1000 posters ont été présentés durant ce symposium, qui a vu la participation de près de 2500 personnes.
Dans ce cadre, le projet PARADEP a été présenté sous forme de poster dans la catégorie « Interactions entre les mammifères marins et les pêcheries ». Le poster s’est particulièrement concentré sur les prototypes préliminaires et leurs tests en milieu naturel, à l’aide de projections de vidéos et des dispositifs physiques. Des contacts intéressants avec d’autres équipes travaillant sur des sujets similaires ont été pris durant cette conférence. Le poster est téléchargeable ci-dessous.
- Published in Non classé, paradep
Tests des premiers prototypes PARADEP

Les premiers tests de dispositifs anti-déprédation ont eu lieu en mer au large de Sète, sur le site du brise-lame, les 02 et 07 août 2019. Des agents IRD, IFREMER et SATIM ont participé à ces expérimentations qui se sont déroulées à bord d’une embarcation IFREMER. L’objectif de ces tests a été de tester deux prototypes de dispositifs (dénommés « A » et « B ») dans un plan d’eau de 20m d’eau. Huit avançons, équipés des prototypes ont été accrochés sur une palangre expérimentale de 35m. Des loups et des merlus ont été accrochés à chaque hameçon afin de simuler le poisson capturé. Quatre prototypes A et quatre prototypes B ont été testés. Une fois la ligne équipée des avançons et des dispositifs mis à l’eau, deux plongeurs se sont mis à l’eau et ont tiré séquentiellement sur les avançons pour simuler la traction exercée par la capture et déclencher chaque dispositif. Les plongeurs étaient équipés de caméras pour filmer le déclenchement de chaque dispositif jusqu’à sa descente sur le poisson. Cinq filages de la palangre expérimentale ont été effectués, correspondant à 40 déclenchements de dispositifs.

Equipage à bord du Chlamys 
Plongeur se dirigeant vers la palangre expérimentale 
Configuration de la palangre expérimentale équipée des 4 dispositifs A et des 4 dispositifs B

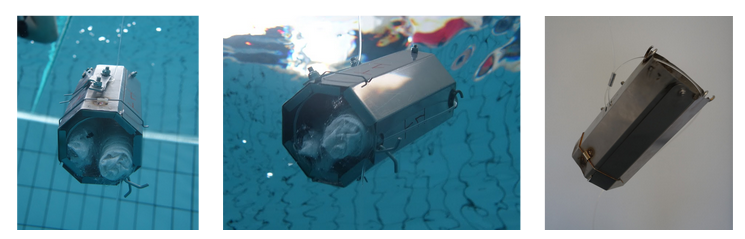
Dispositif A :
Le dispositif A se compose d’un support mobile métallique sur lequel 4 voiles en lin sont accrochées. L’étui, qui s’accroche à l’attache reliant l’avançon à la ligne-mère, se compose de compartiments destinés à loger les voiles. Le support mobile se verrouille sur l’étui au moyen de « pattes ». L’avançon passe à travers le dispositif, ainsi qu’à travers un carré métallique de déverrouillage qui appuie sur le support métallique lorsqu’un poisson exerce une traction sur le fil en nylon. Cette action déclenche la libération du support mobile et des voiles qui coulissent alors le long de l’avançon jusqu’au poisson.

Dispositif A
Dispositif B :
Le dispositif B se compose d’un étui cylindrique creux qui s’accroche à l’attache reliant l’avançon à la ligne-mère. Le support mobile, qui s’insère dans cet étui, se compose des loges destinés à ranger les voiles. Les 4 voiles en lin sont accrochées à la base du support mobile. L’avançon passe à travers le dispositif, ainsi qu’à travers un carré métallique de déverrouillage qui appuie sur le support métallique lorsqu’un poisson exerce une traction sur le fil en nylon. Cette action déclenche la libération du support mobile et des voiles qui coulissent alors le long de l’avançon jusqu’au poisson. A la différence du dispositif A, les voiles restent dans leur loge lors de la descente le long de l’avançon, et en sont extraites avec le courant et/ou avec le mouvement du poisson.

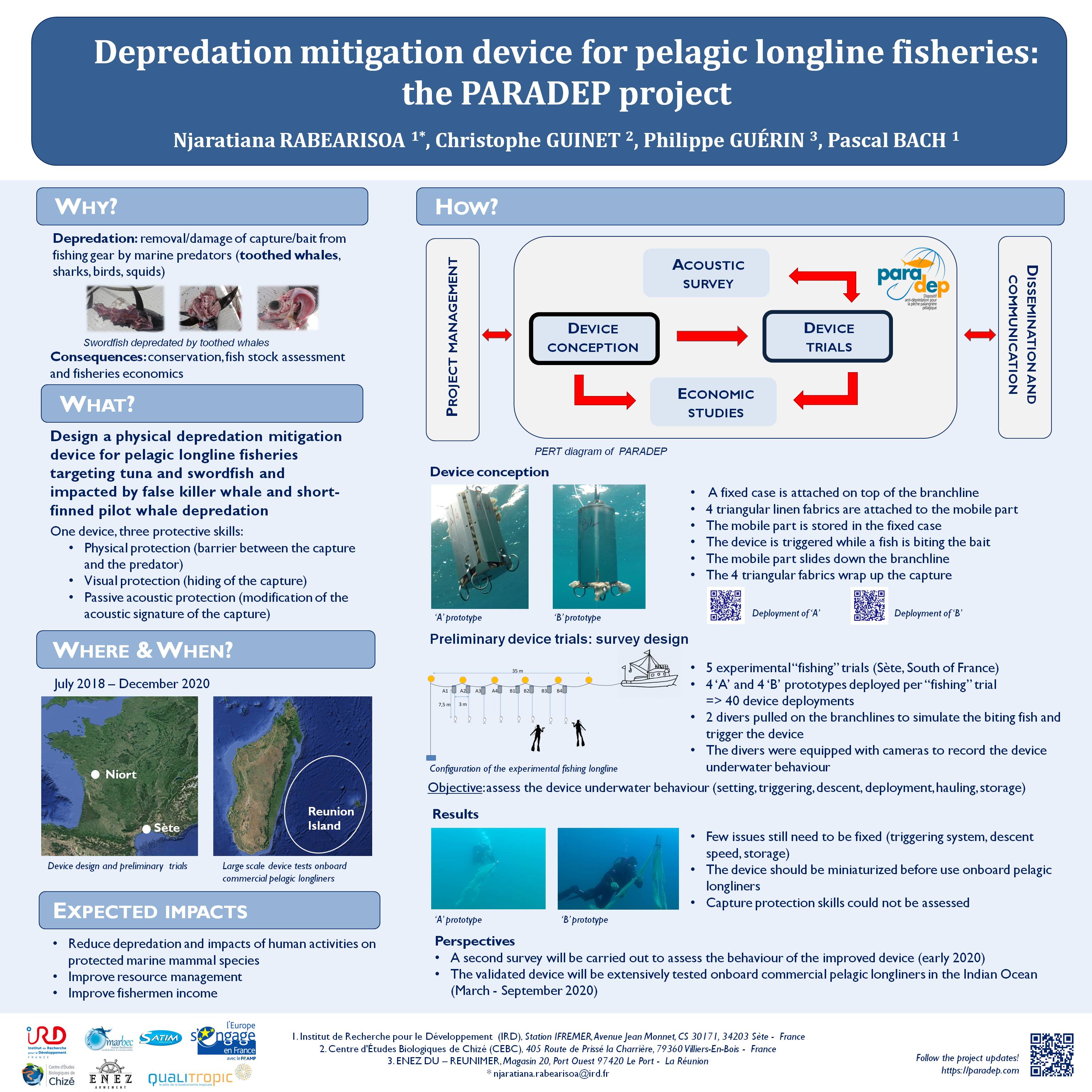
A l’issue des tests, les vidéos enregistrées ont permis d’analyser le comportement des dispositifs. Différents critères ont été évalués pour les deux dispositifs : le comportement au filage, le fonctionnement du système de déclenchement, la vitesse et la fluidité de la descente le long de l’avançon, le déploiement des voiles, la protection du poisson par les voiles, l’emmêlement des voiles entre elles ou avec l’avançon, le comportement au virage et le système de rangement.
L’évaluation de ces différents points a conduit aux critères de satisfaction ci-dessous :
Le rapport de ces premiers tests est disponible ci-dessous :
Les premiers résultats sont encourageants, mais des modifications doivent encore être apportées avant la validation des prototypes. Une deuxième série de tests sera donc programmée fin 2019-début 2020 pour réévaluer le comportement des dispositifs modifiés avant le développement en série en vue d’un déploiement sur les palangriers pour les tests en conditions de pêche.
- Published in Non classé, paradep
Mission d’observations acoustiques du comportement des odontocètes autour d’une palangre pélagique

Du 11 juin au 19 juin 2019, Marc SORIA, ingénieur acousticien du projet PARADEP, a embarqué à bord du Vétyver 6 (palangrier pélagique réunionnais de 16 m de long de l’armement ENEZ Pêche). L’objectif de cette mission était d’améliorer nos connaissances sur le comportement des odontocètes impliqués dans la déprédation autour du bateau. Pour mener cette mission, 24 accéléromètres (placés sur les bas de ligne), 6 hydrophones et 2 caméras (placés sur la ligne-mère) ont été déployés à chaque filage afin d’enregistrer des vidéos de ces animaux en interaction avec la ligne. Les enregistrements effectués par ces instruments devraient permettre d’analyser la présence et le comportement des globicéphales tropicaux et des faux-orques au cours des phases de déprédation des palangres pélagiques afin de mieux cerner les périodes de déprédation, le mode de détection des lignes et le mode de déprédation des proies.
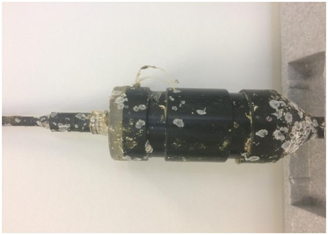
Hydrophone ST300HF 200 mm L x 60 mm D 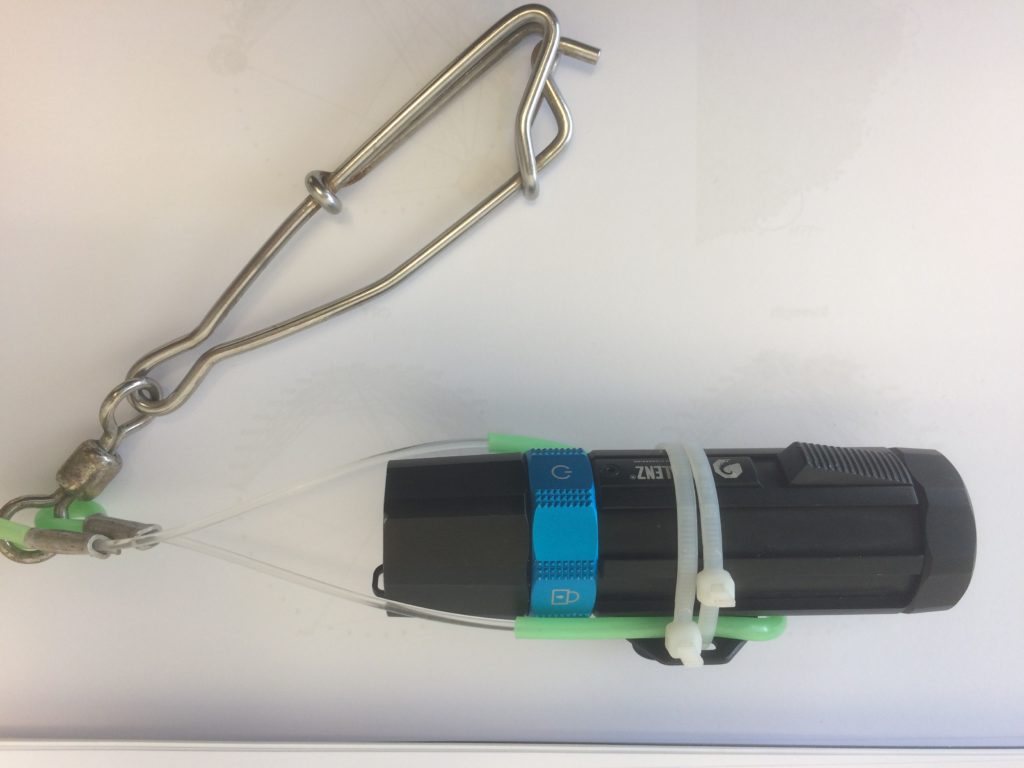
caméra PARALENZ 116 mm L x 38 mm D avec son gréement (snap) 
accéléromètre DEEPG+
Déroulement de la mission
La mission s’est déroulée du 11 au 19 juin 2019, dans une zone de pêche située à environ 100 milles au sud de La Réunion. Six filages de palangre ont été effectués, avec un déploiement du matériel d’enregistrement acoustique et visuel. Les opérations de pêche se sont déroulées comme suit : filage de la ligne de 17h à 21h30, virage de la ligne de 5h à 13h (ou 15h selon le nombre de captures). 90km de ligne étaient mis à l’eau, avec un total de 840 hameçons appâtés avec du calmar.

Localisation de la zone de pêche
Le déploiement des appareils a suivi un plan d’échantillonnage systématique. Les deux caméras sont déployées au début du filage après la bouée de tête de ligne afin d’avoir le plus d’enregistrements de jour. Les 6 hydrophones sont déployés sur les orins des 6 premières bouées de section à environ 6 à 7 mètres de la ligne mère. Les 24 accéléromètres sont déployés de part et d’autres des hydrophones.

Filage de la ligne 
Immersion de la caméra 
Vue sous-marine enregistrée par la caméra
Résultats
Les espèces ciblées capturées ont été principalement le thon jaune, le germon, le thon obèse et l’espadon. Environ 600 kg de poissons ont été capturés par jour. Malheureusement, aucun globicéphale n’a été vu pendant la campagne et aucune trace de déprédation par des mammifères marins n’a été observée sur les prises.

Captures d’un thon et d’un espadon 
Thon déprédaté par un requin

Le traitement des données est en cours. Dans un premier temps nous échantillonnerons : les enregistrements des hydrophones pour tenter de déceler des « clicks » de globicéphales témoins de leur présence, et les enregistrements des accéléromètres pour déceler des secousses témoins de captures sur les bas de lignes aux dates et positions sur la ligne des prises notées. Bien qu’aucun globicéphale ou faux-orque ni de marques de déprédation de mammifères marins n’ait été observé, les données seront tout de même exploitées. En effet, il est possible que l’on ait enregistré des sons émis par des mammifères marins ayant évolué à proximité de la ligne (mais sans l’avoir déprédaté et/ou détecté). Il est aussi possible que nous ayons enregistré des sons émis par les thons et les espadons et nous tenterons de les isoler des enregistrements comme les images éventuelles que nous aurions pu enregistrer avec les caméras.
Le compte-rendu des tests est accessible ci-dessous :
- Published in Non classé, paradep
Tests des premiers prototypes de dispositifs anti-déprédation

02/08/2019 & 07/08/2019 : Premiers tests des prototypes de dispositifs anti-déprédation
Les premiers prototypes de dispositifs anti-déprédation vont être testés en mer, dans une zone de faible profondeur au large de Sète au cours de deux jours d’expérimentations. Ces expérimentations seront menées à bord d’embarcations de l’IFREMER. 8 exemplaires de 2 prototypes différents seront mis à l’eau sur une palangre expérimentale. Des plongeurs les déclencheront sous l’eau et enregistreront leur comportement à l’aide de caméras sous-marines. Des données sur les caractéristiques de déclenchement et de déploiement des dispositifs seront exhaustivement collectées.
Plus d’informations à venir dans le prochain article !
- Published in Non classé, paradep
Tournage documentaire
13-14/06/2019 : Tournage du documentaire sur la genèse du projet et du dispositif anti-déprédation
Dans le cadre d’une réunion de travail dans les locaux de la SATIM (Niort) sur le suivi de la conception du dispositif, Luc MARKIW (service Images IRD) était présent pour filmer le travail d’usinage du prototype et interviewer les différents acteurs du projet. Ces premières images feront partie d’un film documentaire sur le projet PARADEP, qui relatera son déroulement, depuis sa genèse jusqu’aux tests en conditions réelles du prototype final, en passant par les différentes étapes de sa conception.

Luc MARKIW

- Published in Non classé, paradep
Mission tests acoustiques
10/06/2019 : Mission préliminaire d’enregistrements acoustiques au cours d’une marée commerciale
Marc SORIA, ingénieur acousticien impliqué dans le projet PARADEP, embarquera le 10/06/2019 à bord du Vétyver 6 (armement ENEZ) pour une marée commerciale de 15 jours dans les eaux de La Réunion. L’objectif de sa mission sera de déployer des hydrophones, des accéléromètres et des caméras sur la palangre afin d’enregistrer les signaux acoustiques renvoyés par les mammifères marins qui pourraient évoluer à proximité de la ligne, en particulier ceux impliqués dans la déprédation. Il couplera ces enregistrements à des prises de vues lorsque cela sera possible, afin de pouvoir associer des signaux acoustiques à des observations visuelles de mammifères marins. Ces enregistrements permettront d’étudier le comportement acoustique des mammifères marins en situation (ou non) de déprédation.
L’objectif de cette mission est d’appréhender le déploiement de matériel acoustique au cours de marées commerciales. En effet, lors des futurs tests des prototypes de dispositifs anti-déprédation, le même protocole sera mis en oeuvre afin de mieux comprendre le processus de déprédation et évaluer l’efficacité des dispositifs..
- Published in Non classé, paradep
Stage de Sara BOUTAAM
08/04/2019 : Début du stage de Sara BOUTAAM (M2 Mécanique des structures composites : Aéronautique et éco-conception, Université Paris Nanterre).
Sujet : Réflexion sur la conception technologique d’un dispositif visant à réduire la déprédation par les mammifères marins en interaction avec les pêcheries palangrières pélagiques.
Contenu du stage :
- Bibliographie et prise en main du sujet
- Conception des prototypes
- Tests des prototypes in-situ si possible
Encadrement : N. Rabearisoa, P. Bach, P. Vidal (Laboratoire Énergétique Mécanique Électromagnétisme, Université Paris Nanterre), E. Valot (Laboratoire Énergétique Mécanique Électromagnétisme, Université Paris Nanterre).
Durée : 5 mois
Lieu : LEME Paris Nanterre et IRD MARBEC Sète
Le rapport de stage de Sara est accessible ci-dessous :
- Published in Non classé, paradep
Début des travaux sur la conception du dispositif anti-déprédation
Lancement des travaux de développement du dispositif anti-déprédation
Intitulé de la prestation : « Prestation de développement de dispositifs de protection physique des captures destinés à lutter contre la déprédation par les mammifères marins sur les palangriers pélagiques ».
Entreprise retenue : SATIM exploitation (http://www.satim.fr/satim-exploitation.php)
- Published in Non classé, paradep
Réunion de lancement du projet
Réunion entre les partenaires du projet :
- IRD (P. Bach, M. Soria, N. Rabearisoa)
- CEBC CNRS (C. Guinet)
- ENEZ DU (P. Guérin)
Lieu : Muséum National d’Histoire Naturelle (Paris)
- Published in Non classé, paradep

