Project flyer

Tests of PARADEP 3.2

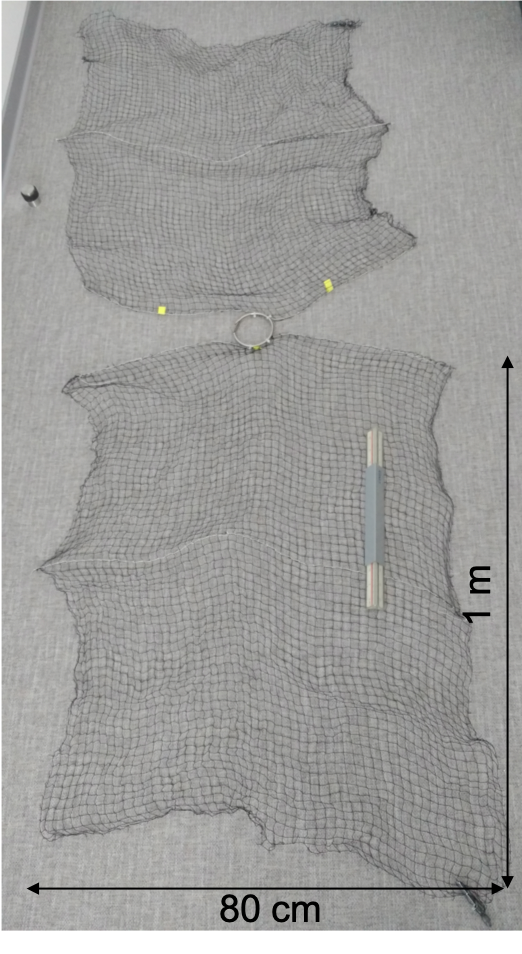
Based on the previous device trials (PARADEP 3.1) which took place in December 2020, the requested changes were applied to the case. As a result, a new design for the carabiner was tested: it is now a circular snap hook, instead of the previous rectangular one. However, the general design of the case has not evolved. The main change involved the material used to conceive the protection net (which will be designed as a cast net*). We chose a high density polyethylene (HDPE) net, with a 16mm mesh size. Stainless steel wire segments were added to the nets in order to improve their deployment skills. The protective cast net was designed as two rectangular nets. During the trials, two net sizes were tested: 100cm*80cm and 100cm*60cm.
Due to the COVID sanitary restrictions preventing us to carry out at-sea experiments in France, the PARADEP trials were conducted in March 2021 in La Réunion Island. Those trials were performed by Marc Soria, the acoustical engineer involved in the project, Nicolas Guillon (NEXA-CITEB, http://www.nexa.re/accueil/) and the diving club Dodo Palmé (https://dodopalme.fr/). The experiments took place during 4 half-days. The same previous experimental protocol was applied: 3 divers recorded the underwater behavior of the devices, from their triggering to the net deployment around the fish. Tests of untimely triggering of the device during simulated line setting and hauling were also carried out.
The first results indicate that the case and the carabiner still need some improvements before being fully operational. Besides, the net material is too rigid and did not deploy as expected. Therefore, we are still looking for the most adequate material. The complete analysis of the recorded footages can be accessed in this report (in french).
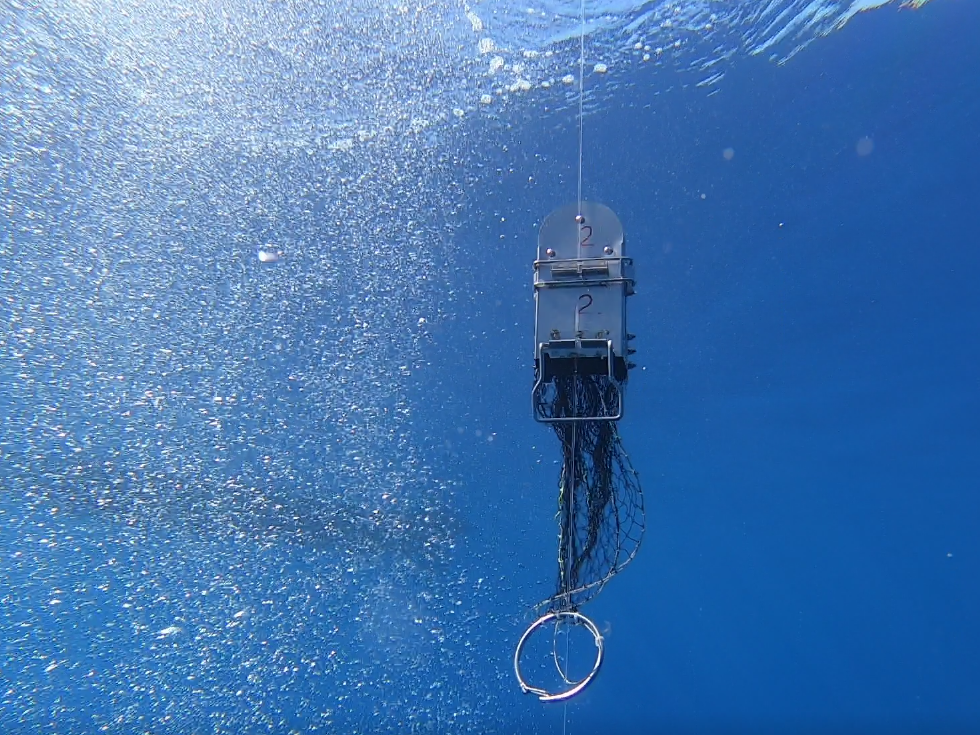
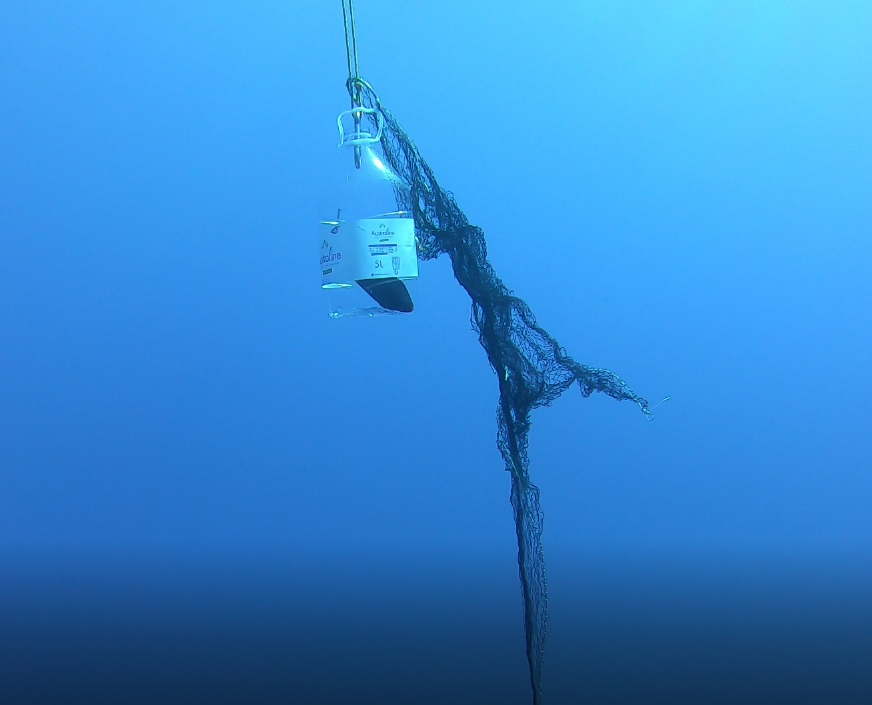
A short movie of the device deployement can be seen below:
We thank the Dodo Palmé diving club, Marc Soria and Nicolas Guillon for their active participation to those trials.
* Here is an example of the cast net fishing technique, upon which the protection net design is based: https://youtu.be/a1jueU4wJMo . In our case, the net slides down the branchline and covers the fish.






Tests of the third version of PARADEP

The third version of the device was tested in July 2020. It was conceived based on the observations raised during the previous experiments. This version is intended to be the final one that will be tested in real fishing conditions on pelagic longline vessels in Reunion Island. This version is made up of: 1) a fixed steel case set on the branchline, 2) and a mobile part simulating a cast net attached to a rectangular carabiner.
- Description of the device
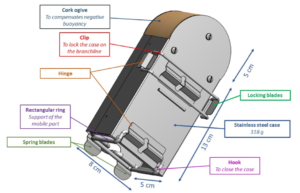
- The case
The parallelepiped stainless case was equipped with a ribbed cork at its top, allowing to compensate for the negative buoyancy of the device under the water. This dome part enhances the device hydrodynamics while it is being hauled. The device size (8cm*5cm*18cm) is intended to ease its handling by the fishermen.
The case is attached to the branchline by using locking blades. The branchline is inserted into the case through a slot located on the carabiner, which is placed at the bottom of the case. The bottom part of the case is closed by a hook that locks onto two spring blades.
- The cast net
The net is made up of two pyramidal pieces cut out from a high-density polyethylene (HDPE) net. The HDPE net has several benefits: low cost, light weight, strength and rot-proofness despite prolonged immersion in sea water. In addition, the net provides a good visual coverage and a low entanglement rate.
The device is triggered when the hooked fish pulls on the branchline, resulting in the unlocking of the spring blades and then the release the net. The carabiner slides along the branchline to the fish.

- Survey protocol
The experimental tests of the V3 “PARADEP” device were carried out during a day at sea in July 2020. The experiments were carried out aboard an 11-meter boat, lent by the diving club Odyssée (http://odyssee-sub.org/). Data related to the device behavior were collected from video footages recorded by three divers.
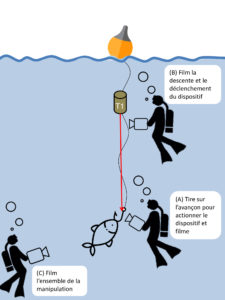
On a 35 m long experimental mainline, 6 short branchlines equipped with the devices were deployed. Once the line and the devices were set, three divers equipped with underwater cameras went into the water. For each prototype, the diver (A) triggered the device by pulling on the branchline to simulate a capture. The diver (B) recorded the triggering and the descent of the device until the net deployment around the fish. The diver (C) recorded the whole experiment to provide a global view of it.
At the end of these tests, the video footages were analyzed and several data were collected: setting of the device on the branchline, its deployment (opening of the case, descent along the branchline, deployment of the nets during the descent, entanglement of the nets if observed), fish protection and storage easiness.
- Results
– The small size of the case allows a good grip and its behavior in the water is satisfying. The issues were mostly related to the hanging and opening systems. The clip intended to attach the case on the branchline was not tight enough.
– The rectangular carabiner will need to be changed into a circular carabiner with an opening and closing system. This would prevent its entanglement with the nets or the exit of the branchline.
– The behavior of the nets was disappointing. They were too bulky and could not get out of the case on their own during the simulation of a capture, so they had to be taken out manually. For the final device, it will be necessary to work with less bulky nets.
This version is certainly close to the expected final version. Some changes are still required:
- Turn the rectangular carabiner into a circular one
- Reinforce the locking blades
- Identify the adequate net for the cast net
- Add some stainless metal wires on the nets to improve its rigidity and provide a passive acoustic protection skill
The improved case was received in December 2020. The adequate net was also identified. A preview of the case behavior and the cast net can be seen below:
Due to the COVID 19 crisis, the validation tests of the prototype are on hold and will be carried out as soon as the sanitary conditions allow them.
Presentation of the project at the Lycée de la Mer, Sète

03/10/2020: The PARADEP project was presented at the Lycée de la Mer, Sète.

Lycée de la Mer Paul Bousquet, Sète
Auriane and Njaratiana presented some results about depredation impacts in the Indian Ocean, how fishermen cope with that issue and what is currently done to mitigate it. The presentation mainly focused on the PARADEP actions. The depredation mitigation prototypes were also shown to the students.



A short extract of Auriane’s presentation can be seen here (in French).
Thanks to Alexandre Castillo and Clément Calmettes, teachers at the Lycée de la Mer, for their warm welcome.
Tests of the PARADEP devices (version #2)
")
The second depredation mitigation device trials were carried out on February 25 and 26, 2020. Those new prototypes include some of the changes identified at the end of the previous trials. Among those modifications, monofilament gill net and ramie were used instead of the linen fabric, the mobile part and the triggering system were improved, a new mounting system was tested, and the opening system was changed.

PARADEP device (version 2)
The first stage of the trials took place in the Nemausa diving pool in Nîmes, France (https://www.vert-marine.com/nemausa-nimes-30/). During this survey, 3 divers equipped with underwater cameras recorded the device deployement and descent. The second stage of the trials took place onboard a small boat on the Etang de Thau. During this second day, an experimental longline equipped with 4 devices was set.
Both surveys aimed at assessing the device behaviour during the line setting, the device deployment (triggering and descent fluidity along the branchline), the protection skills of the net, the device behaviour during the line hauling, the impact of boat speed on the triggering system, and the device storage.
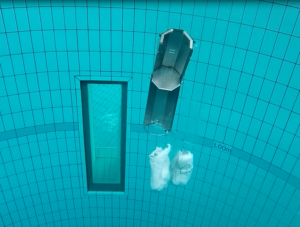
Configuration of the diving pool trials (A. Serval)

Configuration of the Etang de Thau trials (A. Serval)

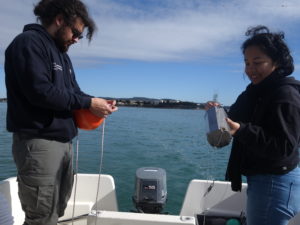

Handling of the devices
Several issues still remained unsolved at the end of those trials, and the device is not fully operational. We are currently working on a third version of the prototype which will soon be tested. Our work will mainly focus on the identification of materials which can be used to design effective protection, and the improvement of the triggering system.
We would like to thank Auriane SERVAL, MARBEC trainee, who was fully invested in this survey. Thanks to Emilie BOULANGER, Romain BACH, Jules HELIOU (divers), Marc SORIA, Luc MARKIW, Ilan PEREZ, Romain GROS and the NEMAUSA aquatic center (Guillaume BARBOTIN and Annabelle BONIN).
Presentation of PARADEP at the WMMC
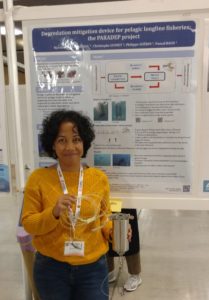
PARADEP was presented at the World Marine Mammal Conference held in Barcelona in December 2019 (https://www.wmmconference.org/). This year, this symposium was jointly organized by the Society of Marine Mammalogy and the European Cetacean Society. This international conference aims at bringing together scientists, students, policy-makers and managers whose work focus on marine mammal science and conservation. A total of 2,500 attendees were registered and around 600 orals and 1000 posters were presented.
The PARADEP project was presented as a poster, as part of the “Fisheries Interactions” theme. The poster mainly focused on the preliminary devices and the underwater tests carried out in August 2019. Video footages of the device behaviour were also played. The poster can be viewed here.
Preliminary tests of the PARADEP devices

The first depredation mitigation device trials were carried out off Sète, south of France, on August 02 and 07, 2019. Researchers and engineers from IRD, IFREMER and SATIM were involved in those trials, which took place onboard an IFREMER research vessel. This survey aimed at assessing the behaviour of two prototypes (named A and B) in shallow waters. A 35m long mainline was suspended in the water by 6 floats to simulate a pelagic longline. Eight branchlines equipped with eight A and B devices were attached to the mainline. European bass and hake were hooked to each branchline to simulate the captured fish. Once the whole mainline was set, two divers sequentially pulled on the branchlines to simulate a biting fish and trigger each device. Waterproof cameras were used to record the behaviour of each device, from its triggering to the moment it slid down and protected the fish. A total of five line settings were carried out, corresponding to 40 device triggerings.

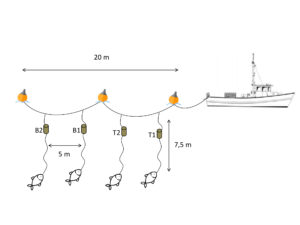
Configuration of the experimental longline equipped with 4 “A prototypes” and 4 “B prototypes”

RV Chlamys

Diver swimming towards the experimental line
“A” device:
The A device is made up of a metallic mobile support, on which four linen veils are attached. The case, attached to the branchline snap with a snap hook, is designed to store the veils. The nylon branchline is inserted inside the device. When a fish is hooked, a metallic element presses down on the mobile support and triggers the device. This releases the mobile support which slides down the branchline. Then, the veils are deployed around the fish and protect it from predators.

“A Device”
“B” device:
The B device is made up of a cylindrical hollow case attached to the branchline snap. The mobile support is inserted in that case, and is made up of four compartments dedicated to store the veils. The four linen veils are attached at the base of the mobile support. The branchline is inserted into the case and the mobile support. When a fish is hooked, a metallic element presses down on the base of the mobile support and triggers the device. This releases the mobile support which slides down the branchline. Unlike the A device, the veils are still stored in their storage compartment when the B device is triggered. Thanks to water currents or fish movements, the veils exit their storage space, are deployed around the fish and protect it from predators.

“B Device”
At the end of the survey, recorded movies were used to assess the device behaviour. Several technical factors were analyzed for both devices: setting behaviour, correct functioning of the triggering system, veils deployment, fish protection, hauling behaviour, storage system. We also wanted to assess how quick and easy the device slid down the branchline.
Those analyses resulted in the following satisfaction table:
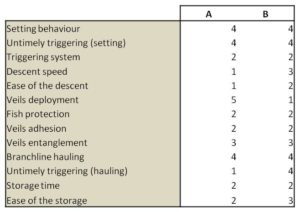
Evaluation of the satisfaction level regarding the behaviour of PARADEP (1: very low level, 2: low level, 3: medium level, 4: high level, 5: very high level)
You can download the preliminary report here (in French).
These first results gave valuable insights to improve the PARADEP device. A second survey will be implemented at the end of 2019 (or the beginning of 2020) to assess the behaviour of the modified devices. This will lead to the mass production of the depredation mitigation device, which will be tested onboard commercial pelagic longliners in Reunion Island from March 2020.
Acoustic monitoring of depredating marine mammals

June 11 – 19, 2019: Marc SORIA, our acoustic engineer involved in the PARADEP project, undertook an acoustic survey onboard the Vetyver 6 during a commercial fishing campaign. That 16 m long commercial pelagic longliner belongs to the fishing company and project partner ENEZ DU. The goal of that survey was to improve our knowledge about the behaviour of toothed whale species involved in depredation and evolving in the vessel vicinity. During each fishing operation, 24 accelerometers, 6 hydrophones and 2 underwater cameras were set. Hydrophone allows detection of sounds emitted by marine mammals, while accelerometer provides information about the way they move and their behaviour. Collected data will allow to assess false killer whales and short-finned pilot whales’ presence and behaviour during depredation events. In the end, we expect to get new insights into toothed whale depredation process: preferential period of the day for depredation, cues that may lead to line detection and capture detection.

ST300HF hydrophone 200 mm L * 60 mm D (A), PARALENZ camera with snap 116 mm L * 38 mm D (B), DEEPG+ accelerometer (C)
Survey monitoring
The fishing trip took place from June 11 to June 19, 2019, in a fishing area located 100 miles south of La Réunion Island. Six fishing operations were undertaken, and the aforementioned material was deployed during each longline setting. A total of 840 hooks (baited with squid) were set.

Fishing area
Both underwater cameras were deployed on the mainline, at the beginning of the line. The hydrophones were deployed on the first six floatlines and the accelerometers were set on both sides of the hydrophones.

Line setting

Camera immersion

Underwater view recorded by one camera
Results
Catch mainly included yellowfin, albacore, bigeye tunas and swordfish. About 600 kg of fish were caught each day. Unfortunately, neither toothed whale nor toothed whale depredation event was recorded during the survey.

Captures of tuna and swordfish

Tuna depredated by shark
Data processing is currently ongoing. First, we will sample acoustic data to detect potential toothed whale clicks. Then, we will analyze the accelerometers data to detect capture events and potential predator movements in the line vicinity. Despite the fact that no toothed whale depredation event was witnessed, we will analyze the recorded data anyway. Indeed, sounds emitted by marine mammals evolving near the line may have been recorded. Sounds emitted by tuna and swordfish may have also been recorded.
The report will be available soon.
Filmmaking of a documentary about PARADEP
13-14/06/2019 : Shooting of a documentary about the conception of the depredation mitigation device
During a work meeting with the SATIM team (Niort, France) in charge of the device conception, Luc MARKIW (IRD Images) recorded the different steps of the prototype machining. He also interviewed some of the actors involved in the project. Those shootings will be used in a general documentary relating the genesis of PARADEP, from its conception to the final tests onboard commercial pelagic longliners.

Acoustic survey
06/10/2019: Preliminary acoustic survey onboard a commercial pelagic longliner
Marc SORIA, acoustical engineer involved in the PARADEP project, will be onboard the Vétyver 6 (ENEZ DU fishing company) during a commercial fishing trip which will last 15 days. He will deploy several hydrophones, accelerometers and cameras along the longline, in order to record acoustic signals emitted by marine mammals evolving near the fishing gear. Acoustic recordings will be associated with visual observations when possible. This will allow to associate the acoustic signals with specific marine mammal species.
The acoustic material will be deployed again during the commercial trips aiming at testing the depredation mitigation devices. The general objective of those acoustic recordings is to improve our knowledge about the depredation process. They will also allow a better understanding of the marine mammal acoustic behavior during depredation events.
Internship of Sara BOUTAAM
4/8/2019 : Start of the internship of Sara BOUTAAM (MSc Mechanics of composite structures: aeronautics and eco-design, Paris Nanterre University).
Title: Design of a toothed whale depredation mitigation device for pelagic longline fisheries: food for thought
Internship content:
- Bibliography
- Design of the prototypes
- Field tests if possible
Supervisors: N. Rabearisoa, P. Bach, P. Vidal (Energetics Mechanics Electromagnetism Laboratory , Paris Nanterre University), E. Valot (Energetics Mechanics Electromagnetism Laboratory, Paris Nanterre University).
Duration: 5 months
Host laboratories: LEME Paris Nanterre and IRD MARBEC Sète
Initiation of the device development
Objective: Design of a physical depredation mitigation device
This innovative device will have three protective skills: physical (barrier between the fish and the predator), visual (hiding of the fish) and passive acoustic (modification of the fish acoustic signature).
Service provider: SATIM Exploitation (http://www.satim.fr/satim-exploitation.php)
Quick-off meeting
Quick-off meeting with project partners:
- IRD (P. Bach, M. Soria, N. Rabearisoa)
- CEBC CNRS (C. Guinet)
- ENEZ DU (P. Guérin)
Place: National Museum of Natural History (Paris)


{kind=link}